柍慄儌僕儏乕儖墳梡儔僕僐儞幵柍慄儌僕儏乕儖墳梡儔僕僐儞幵
柍慄儌僕儏乕儖墳梡儔僕僐儞幵柍慄儌僕儏乕儖墳梡儔僕僐儞幵315MHz偺巗斕偺柍慄憲庴怣儌僕儏乕儖傪巊偭偰
PIC偱憲庴怣憰抲傪嶌偭偰儔僕僐儞幵傪嶌偭偰
傒傑偟偨丅
315MHz偲偄偆柍嫋壜偺旝庛揹攇傪巊偭偨柍慄憲庴怣儌僕儏乕儖偑擖庤偱偒偨
偺偱丄巊偭偰傒傑偟偨丅
柍慄儌僕儏乕儖偼彫宆偵偱偒偰偄偰丄姰慡偵柍挷惍偱巊梡偱偒丄315MHz偲偄偆
偳偪傜偐偲偄偆偲丄帺嶌偡傞偵偼丄傗傗庢傝慻傒偵偔偄崅廃攇傪偄偲傕娙扨偵
巊偆偙偲偑弌棃傞偨傔丄怓乆墳梡偑弌棃偦偆偱偡丅
崱夞偼偲傝偁偊偢儔僕僐儞帺摦幵偵棙梡偟偰傒偨傕偺偱丄儔僼側傾儞僥僫偱傕
侾侽倣掱搙偼撏偒偦偆側偺偱幒撪梡偵巊偆暘偵偼暥嬪柍偟偱偡丅
傑偨丄廃攇悢偑崅偄偺偱憲庴怣傕埨掕偱丄儌乕僞偺僲僀僘偵傕慡偔塭嬁偝傟偢
埨掕偵憲庴怣偱偒傑偡丅
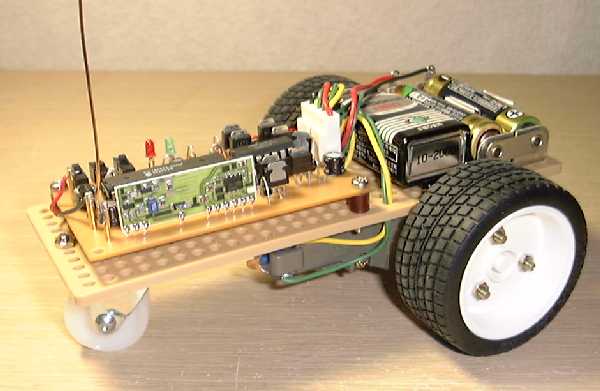
崱夞偺惢嶌椺偺慡懱峔惉偼庴怣儐僯僢僩傪搵嵹偟偨帺摦幵偲丄憖廲梡偺憲怣婡
偐傜惉偭偰偄傑偡丅

庴怣儐僯僢僩
憲怣婡
亂憲庴怣儌僕儏乕儖偺巇條亃
崱夞擖庤偟偨柍慄偺憲庴怣儌僕儏乕儖偺巇條偼壓婰偺傛偆偵側偭偰偄傑偡丅
巊偄曽偲偟偰偼丄扨弮偵俿俿俴儗儀儖偺僨傿僕僞儖怣崋傪憲怣儌僕儏乕儖偵
擖椡偡傟偽丄柍慄怣崋偲偟偰弌椡偝傟丄庴怣儌僕儏乕儖偐傜摨偠僨乕僞偑
俿俿俴儗儀儖偱弌椡偝傟傞偲偄偆扨弮摦嶌偱偡丅
扨弮偵巊偊傞偺偱偡偑丄巊偄曽偱丄偪傚偭偲拲堄偑昁梫側偙偲偼丄俫倝倗倛偺怣崋
傪楢懕偟偰憲怣儌僕儏乕儖偵擖椡偟偰傕丄悢10msec屻偵偼丄柍慄揹攇偑搑愨
偊偰丄庴怣儌僕儏乕儖懁偺弌椡偑Low儗儀儖偲側偭偰偟傑偆偙偲偱偡丅
廬偭偰丄挷曕摨婜曽幃偱捠怣傪偡傞偨傔偵偼丄偙偺悢10msec埲撪偵丄師偺
僨乕僞傪弌椡偟偰捠怣傪忢帪楢懕偟偰峴偭偰偄傞偙偲偑昁梫側偙偲偱偡丅
丂丂惢憿儊乕僇丂丗丂塸崙丂RF Solution幮
丂丂斕攧尦丂丂丂丗丂傾僀丒僺乕丒傾僀幮
丂丂揹攇巇條丂丂丗丂315MHz懷丂旝庛揹攇
丂乻庴怣儌僕儏乕儖乼
丂丂揹尮揹埑丂丂丗丂俆V亇侽丏俆V
丂丂徚旓揹棳丂丂丗丂嵟戝俁倣俙
丂丂庴怣廃攇悢丂丗丂俀侽侽乣係俆侽俵俫倸
丂丂庴怣姶搙丂丂丗丂亅侾侽俆倓俛倣
丂丂捠怣懍搙丂丂丗丂嵟戝俁倠俫倸
丂丂弌椡怣崋丂丂丗丂俿俿俴儗儀儖(High 3.7Vtyp)
丂丂奜宍悺朄丂丂丗丂栺俁俉亊侾俁亊俁倣倣
AM-HRR3-315
庴怣儌僕儏乕儖偺奜娤
姰慡柍挷惍偱怗傞偲偙傠偼
壗傕柍偄丅
丂乻憲怣儌僕儏乕儖乼
丂丂揹尮揹埑丂丂丗丂俀乣侾係倁乮捠忢俆倁乯
丂丂徚旓揹棳丂丂丗丂捠忢係倣俙
丂丂憲怣廃攇悢丂丗丂俁侽俁丏俉乣係俁俁丏俋俀俵俫倸
丂丂憲怣弌椡丂丂丗丂侽倓俛倣丂乮俙俵曄挷曽幃乯
丂丂僗僾儕傾僗丂丗丂亅俁侽倓俛們
丂丂憲怣懍搙丂丂丗丂嵟戝係倠俫倸
丂丂擖椡怣崋丂丂丗丂俿俿俴儗儀儖乮High亜2V)
丂丂奜宍悺朄丂丂丗丂栺侾俉亊侾俀亊俁倣倣丂丂
丂丂丂
AM-RT5-315
憲怣儌僕儏乕儖偺奜娤
旕忢偵彫宆偵弌棃偰偄傞丅
偙偪傜傕姰慡柍挷惍
亂庴怣儐僯僢僩偺峔惉亃
幵懁偵搵嵹偡傞庴怣儐僯僢僩偼丄PIC16F873偱峔惉偟丄柍慄庴怣儌僕儏乕儖偱
庴偗偨僨乕僞傪撪憼偺USART偱庴怣偟傑偡丅
偦偟偰弌椡偵偼丄僨乕僞庴怣妋擣偲僄儔乕昞帵梡偵敪岝僟僀僆乕僪傪丄
儌乕僞惂屼梡偵偼丄撪憼CCP儌僕儏乕儖傪巊偭偰懍搙惂屼偑弌棃傞傛偆偵
PWM儌乕僪偲偟傑偟偨丅
傑偨丄俀屄偺儌乕僞傪偦傟偧傟撈棫偵丄壜曄懍丄惓揮乛媡揮偺惂屼偑偱偒傞
傛偆偵偟偰偄傑偡丅
偙偺庴怣儐僯僢僩偺夞楬恾偼壓恾偺傛偆偵側偭偰偄傑偡丅H僽儕僢僕偼
MOS僩儔儞僕僗僞傪巊偄丄惓揮乛媡揮偺愗懼偺偨傔丄NAND偺IC傪侾屄
巊梡偟偰偄傑偡丅偙傟偱椉曽偺儌乕僞傪摨帪偵惓揮偲媡揮傪愗傝懼偊傞
偙偲偑弌棃傑偡丅
傑偨儌乕僞梡偺揹尮偼撈棫偵偟偰丄奜晹偐傜嫙媼偡傞偙偲偲偟偰偄傑偡丅
NAND偱P宆MOS僩儔僕僗僞偺惂屼傪偟偰偄傑偡偺偱丄儌乕僞梡偺揹尮
偲偟偰偼丄俆V埲忋偵偼弌棃傑偣傫丅
僗僀僢僠偑俀屄愙懕偝傟偰偄傑偡偑丄崱夞偼巊偭偰偄傑偣傫丅
亂庴怣儐僯僢僩偺惢嶌亃
偙偺庴怣儐僯僢僩偼慡偰侾枃偺曅柺僾儕儞僩婎斅偱嶌偭偰偄傑偡丅
晹昳揰悢偼H僽儕僢僕娭楢偑傗傗懡偄偱偡偑丄偦偺懠偼彮側偄偺偱
幚憰偼偝傎偳擄偟偔偼偁傝傑偣傫丅
弌棃忋偑偭偨庴怣儐僯僢僩偼僇儔乕偱彮偟晜偐偣偰幵懱偺僾儗乕僩偵
庢傝晅偗傑偡丅
儌乕僞偲偺愙懕偼嵍幨恀偺傛偆偵
僐僱僋僞愙懕偲偟傑偟偨丅
傾儞僥僫偼懢偝侾倣倣偺僄僫儊儖慄傪
15cm掱搙偺挿偝偵偟偰偄傑偡丅
H僽儕僢僕偼MOS僩儔儞僕僗僞偱峔惉偟偰
偄傑偡丅
壓婰偼庴怣儐僯僢僩偺夞楬恾偲僷僞乕儞恾偺僨乕僞偱偡丅
IVEX幮偺CAD偱偁傞WinDraft偐WinBoard偱尒傞偙偲偑弌棃傑偡丅
丂丂仛丂庴怣儐僯僢僩偺夞楬恾僨乕僞
丂丂仛丂庴怣儐僯僢僩婎斅僷僞乕儞恾
丂丂仛丂庴怣儐僯僢僩婎斅僷僞乕儞恾乮BMP僼傽僀儖乯
亂庴怣儐僯僢僩偺僾儘僌儔儉亃
憲怣婡丄庴怣儐僯僢僩偲傕偄偢傟傕崱夞偺僾儘僌儔儉偼丄C尵岅偱嶌偭偰
偄傑偡丅
偦偺偨傔丄USART傗CCP偺惂屼側偳偑幚偵娙扨偵弌棃偰偟傑偭偰偄傑偡丅
庴怣摦嶌偲偟偰偼丄忢帪USART偐傜偺僨乕僞庴怣懸偪偲側偭偰偄偰丄庴怣
僨乕僞傪庴偗傞搒搙丄僉乕偺僐乕僪偵廬偭偰壓昞偺傛偆側惂屼傪幚峴偟傑偡丅
儌乕僞偺懍搙惂屼偼丄CCP儌僕儏乕儖傪PWM儌乕僪偱巊偄丄俀屄偺CCP
儌僕儏乕儖傪丄偦傟偧傟俀屄偺儌乕僞偵懳墳偝偣偰丄撈棫偵懍搙惂屼偑
偱偒傞傛偆偵偟偰偄傑偡丅
No
僐乕僪
婡丂擻
婡丂擻丂撪丂梕
SW1
S11
慜恑
椉儌乕僞傪惓揮偲偟PWM傪尰嵼僨儏乕僥傿偵僙僢僩
SW2
S22
嵍夞揮
儌乕僞俀偺PWM僨儏乕僥傿傪尭傜偟懍搙僟僂儞
SW3
S33
屻恑
椉儌乕僞傪媡揮偲偟丄PWM傪尰嵼僨儏乕僥傿偵僙僢僩
SW4
S44
懍搙傾僢僾
椉PWM偺僨儏乕僥傿傪傾僢僾
SW5
S55
捈恑
僨儏乕僥傿偺戝偒偄曽偵崌傢偣偰PWM傪僙僢僩
SW6
S66
懍搙僟僂儞
椉PWM偺僨儏乕僥傿傪僟僂儞
SW7
S77
側偟
壗傕偟側偄
SW8
S88
塃夞揮
儌乕僞侾偺PWM僨儏乕僥傿傪尭傜偟懍搙僟僂儞
SW9
S99
掆巭
椉PWM偺僨儏乕僥傿傪侽偵偟偰丄僽儗乕僉儌乕僪
僉乕僐乕僪偼ASCII暥帤偱俁暥帤偱丄嵟弶偼塸暥帤偺乽S乿偱師偺俀暥帤偼
墴偟儃僞儞僗僀僢僠偺斣崋傪俀夞楢懕偡傞丅
偙偺僉乕僐乕僪傪俀夞庴怣偟偰丄堦抳傪妋擣偡傞偙偲偱丄僨乕僞揮憲僄儔乕
偺僠僃僢僋傪偟偰偄傑偡丅乮娙扨側俀楢憲徠崌偱偡丅乯
SW5偺捈恑婡擻偼丄SW2偐SW8偱嬋偑偭偨偁偲丄偡偖捈恑摦嶌偵栠偡偨傔
偺婡擻偱丄嬋偑偭偨傜捈偖SW5傪墴偣偽丄偦偺岦偒偱捈恑偵栠傝傑偡丅
惂屼曽朄偲偟偰偼丄嬋偑傞偨傔偵尭懍偟偨儌乕僞傪丄尦偺懍搙偵栠偡偨傔丄
斀懳懁偺儌乕僞偲摨偠懍搙偵愝掕偟捈偟傑偡丅
偙傟傜儌乕僞偺尭懍丄壛懍傪偡傞帪偵丄僨儏乕僥傿抣傪偳傟傎偳偺崗傒偱
壛尭嶼偡傞偐偼丄憖廲惈擻偵偐偐傢傝傑偡偺偱丄婔偮偐帋偟偰傒偰寛傔傞
偺偑椙偄偲巚偄傑偡丅乮杮椺偱偼丄侾侽偯偮壛尭嶼偟偰偄傞乯
惓揮丄媡揮偺愗懼偺惂屼偺帪偵偼拲堄偑昁梫偱丄堦扷椉曽偺儌乕僞偺
惓揮丄媡揮偺惂屼怣崋傪椉曽偲傕OFF偵偟偰偐傜丄夵傔偰丄偳偪傜偐傪
ON偲偟傑偡丅偦偆偟側偄偲丄儌乕僞梡僶僢僥儕揹尮傪MOS僩儔儞僕僗僞偱
弖娫偱偡偑丄僔儑乕僩偡傞偙偲偵側偭偰偟傑偄丄戝揹棳偑棳傟傑偡偺偱
嵟埆丄MOS僩儔儞僕僗僞偑夡傟偰偟傑偄傑偡丅
丂丂仛丂庴怣儐僯僢僩僾儘僌儔儉乮C尵岅偱彂偐傟偰偄傑偡乯
丂丂仛丂庴怣儐僯僢僩僾儘僌儔儉乮HEX僼傽僀儖乯
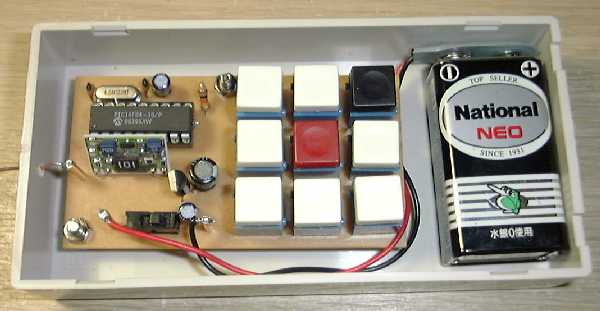
亂憲怣婡偺峔惉亃
憲怣婡偼丄PIC16F84偱峔惉偟丄墴偟儃僞儞僗僀僢僠偺擖椡傪忢帪僠僃僢僋偟偰
擖椡偑偁傟偽偦傟偵懳墳偟偨僐乕僪傪柍慄憲怣儌僕儏乕儖偐傜憲怣偡傞偲偄偆
摦嶌偵側偭偰偄傑偡丅
揹尮偵偼侽侽俇P偺姡揹抮傪巊梡偟丄俋V偐傜俆V傪嶌傞俁抂巕儗僊儏儗乕僞偵偼
掅揹埑僪儘僢僾僞僀僾傪巊偭偰揹抮傪偓傝偓傝傑偱巊偊傞傛偆偵偟傑偟偨丅
僨乕僞憲怣偵偼USART傪巊梡偟傑偡偑丄PIC16F84偼撪憼偟偰偄側偄偺偱丄
僾儘僌儔儉偱僔儕傾儖捠怣傪幚峴偟偰偄傑偡丅
憲怣婡偺慡懱夞楬恾偼壓恾偲側偭偰偄傑偡丅PIC16F84傪拞怱偵丄僗僀僢僠
偲憲怣儌僕儏乕儖丄揹尮夞楬偲娙扨側峔惉偱偡丅
亂憲怣婡偺僾儘僌儔儉亃
憲怣婡偺僾儘僌儔儉傕C尵岅偱嶌偭偰偄傑偡丅偙偺偨傔僔儕傾儖捠怣傪
娙扨偵幚尰偱偒偰偄傑偡丅
CCS幮偺C尵岅偱RS232C傪巜掕偡傞偲丄杮棃USART儌僕儏乕儖傪撪憼
偟偰偄傞PIC偺応崌偵偼丄偦偺USART傪巊偭偨僾儘僌儔儉傪惗惉偟丄
PIC16F84偺傛偆偵USART儌僕儏乕儖傪撪憼偟偰偄側偄PIC偺応崌偵偼丄
僾儘僌儔儉偱RS232C傪幚尰偡傞僾儘僌儔儉傪帺摦惗惉偟偰偔傟傑偡丅
廬偭偰丄PIC偺庬椶傪婥偵偣偢偵RS232C偺僔儕傾儖捠怣傪巊偭偨
僾儘僌儔儉傪嶌傞偙偲偑偱偒丄旕忢偵曋棙偵巊偊傑偡丅
憲怣婡偺僾儘僌儔儉偼丄忢帪僗僀僢僠偑墴偝傟偨偐偳偆偐傪挷傋偰偍傝丄
傕偟偳傟偐堦偮偱傕墴偝傟偰偄傟偽丄偦偺僗僀僢僠偵廬偭偨僉乕僐乕僪
傪柍慄揹攇偲偟偰弌椡偟傑偡丅
偙偺偲偒弌椡偝傟傞僉乕僐乕僪偼忋婰昞偵偁傞俁暥帤偺僐乕僪偱偡丅
堦搙僗僀僢僠偑墴偝傟偰偄傞偺傪専抦偟偨傜丄師偺僗僀僢僠偑墴偝傟偰
偄傞偐偼僠僃僢僋偣偢丄弶傔偵栠偭偰嵞搙摨偠張棟傪孞傝曉偟傑偡丅
廬偭偰丄暋悢屄偺僗僀僢僠偑墴偝傟偰傕丄嵟弶偵専弌偟偨僗僀僢僠偺傒偺
張棟偑幚峴偝傟丄屻偺曽偼壗傕専弌偝傟傑偣傫丅
偙偺張棟偼10msec枅偵孞傝曉偡傛偆偵側偭偰偍傝丄僗僀僢僠偑墴偝傟偨
傑傑偩偲丄摨偠僉乕僐乕僪傪弌偟偮偯偗傞偙偲偵側傝傑偡丅
丂丂仛 憲怣婡偺僾儘僌儔儉乮C尵岅偱彂偐傟偰偄傑偡乯
丂丂仛 憲怣婡偺僾儘僌儔儉乮HEX僼傽僀儖乯
亂憲怣婡偺惢嶌亃
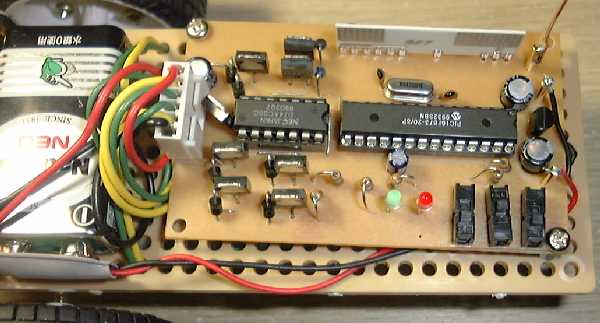
偙偺憲怣婡偺撪晹偼壓婰幨恀偺傛偆偵側偭偰偍傝丄晹昳悢偑彮側偄偺偱丄
偠偮偵娙扨側峔惉偲側傝傑偡丅偙傟偑PIC偺嵟傕揟宆揑側峔惉偱偡丅
傾儞僥僫偼侾倣倣偺懢偝偺僄僫儊儖慄傪捈愙婎斅偺抂巕偵偼傫偩晅偗偟丄
働乕僗偵偁偗偨寠偐傜奜偵弌偟偰偄傑偡丅栺侾俆們倣掱搙偺挿偝偱偡丅
偙偺挿偝偼揔摉偱偡丅乮杮棃偼315MHz梡偺嵟揔抣偑偁傝傑偡偑乯
晹昳悢偑彮側偄偺偱撪晹偼
娙扨側峔惉偲側偭偰偄傑偡丅
壓婰偼憲怣婡偺夞楬恾偲僷僞乕儞恾偺僨乕僞偱偡丅IVEX幮偺CAD偱偁傞
WinDraft偐WinBoard偱尒傞偙偲偑弌棃傑偡丅
丂丂仛憲怣婡偺夞楬恾僨乕僞
丂丂仛憲怣婡偺僷僞乕儞恾僨乕僞
丂丂仛憲怣婡偺僷僞乕儞恾乮BMP僼傽僀儖乯
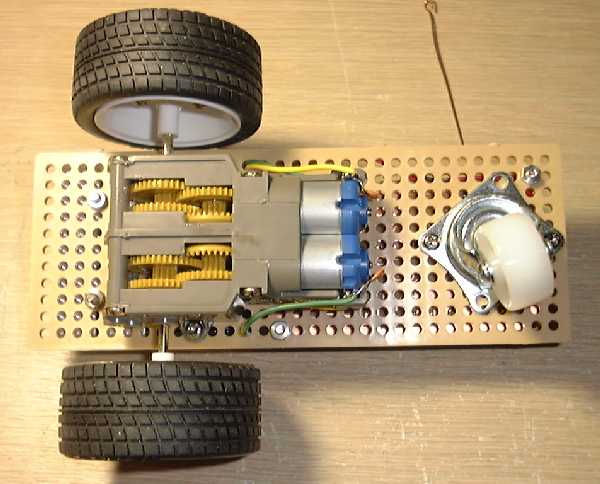
亂幵懱偺惢嶌亃
幵懱偼椺偵傛偭偰僞儈儎偺岺嶌僔儕乕僘傪巊偭偰偄傑偡丅
儐僯僶乕僒儖僾儗乕僩傪僔儍乕僔偵偟偰丄儌乕僞偼僣僀儞僊儎儌乕僞傪
偦偺傑傑巊偭偰偄傑偡丅
僞僀儎傕摨偠僔儕乕僘偐傜忎晇偦偆側傕偺傪慖傃傑偟偨丅
慜椫偵偼僉儍僗僞偺堦斣彫宆偺傕偺傪慖傃傑偟偨丅
揹抮偼丄儌乕僞揹尮梡偼傾儖僇儕扨3揹抮俀屄偱俁V丄庴怣儐僯僢僩梡偼
侽侽俇P偺俋V傪巊偄傑偟偨丅
僞儈儎偺岺嶌僔儕乕僘偱幵懱傪
峔惉偟偨丅
庴怣儐僯僢僩偼傓偒弌偟偺傑傑偱偡丅
儌乕僞偼掅懍宆僣僀儞僊儎儌乕僞傪
偦偺傑傑巊偄丄儌乕僞偺抂巕偵偼
僲僀僘杊巭梡偺僙儔儈僢僋僐儞僨儞僒
(0.001兪F乯傪晅偗傑偟偨丅
慜椫偼僉儍僗僞