多用途ラジコン車
多用途ラジコン車 多用途ラジコン車
【概要】
無線ラジコン、赤外線リモコン、ライントレーサなど、多用途に使える
ラジコン車です。
シャーシ、駆動部はすべてタミヤの工作キットでまとめましたので簡単に
製作可能です。
モータのPWM駆動が簡単にできるようにするため、コントローラ部には
16ビットのPICマイコンのPIC24FJ64GA002を使いました。出力コンペア
モジュールが5組実装されていますので、簡単に2個のモータのHブリッジ
を組むことができます。
さらにUARTで無線や赤外線を受信する場合にも、ピンの割付を変える
だけで切り替えができますので簡単にできます。
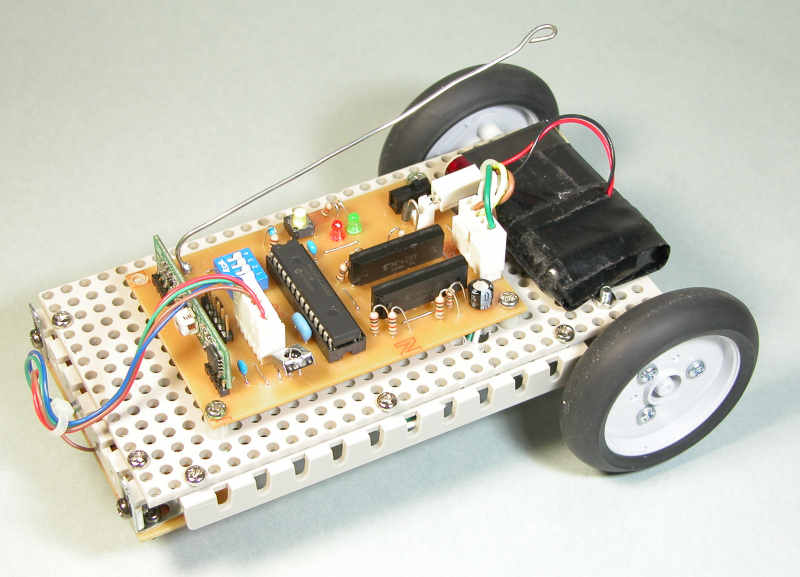
全体の外観は下図のようになっています。
電池はリチウムイオン充電池1個
でモータと制御部両方に供給して
いますので、全体が軽量化できました。
先端部はラインセンサの基板です。
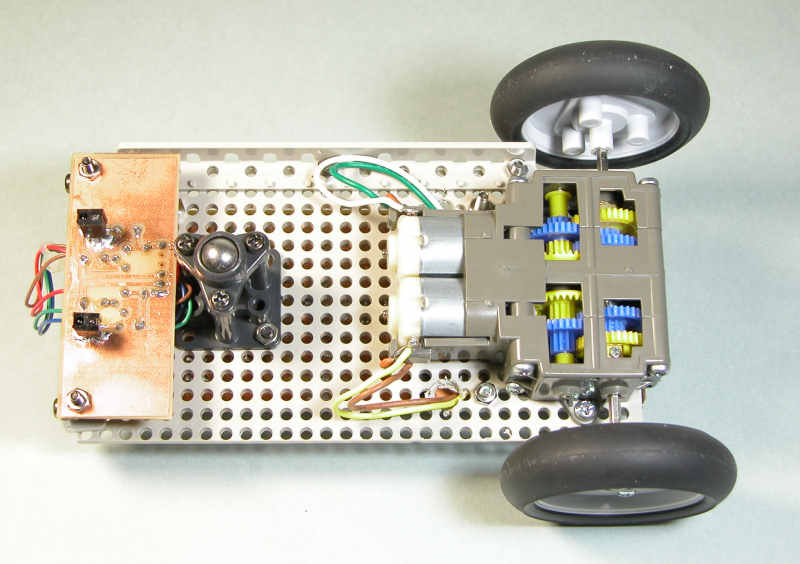
下側の駆動部です。
ツインギアモータとナロータイヤで
駆動を構成し、前輪はボールキャスタと
しています。
【全体構成】
コントローラ部の全体構成は下図のようになっています。
全体を制御するのはPIC24FJ64GA002という28ピンの16ビットPICマイコンです。
このPICには出力コンペアモジュールが5個実装されていて、5本のPWM信号が
出力できます。そこでこの中の4本を使って2個のモータのHブリッジを直接PWM
制御して可変速制御と方向切り替えを一緒にできるようにしています。
これによりモータ用のドライバとしてFETトランジスタを4個内蔵したFETアレイだけ
で構成することができますので、非常に簡単な回路構成とすることができます。
無線と赤外線とどちらでも使えるように、無線受信モジュールと赤外線受光モジュール
の両方を実装しています。これらのデータの受信には、UARTモジュールを使います。
DIPスイッチで動作モードを切り替えることでどちらかで動作するようにします。
電源は、リチウムイオン充電池を使います。モータにはこの電池から直接供給し
制御部には、3端子レギュレータで3.3Vとして供給します。
ライントレーサの場合などの入力をする汎用のポートを4ピン持っています。
【回路構成】
上記構成図に基づいて作成した制御部の回路図が下図となります。
左側が無線と赤外線の受信部、右側がモータドライバとなるFETアレイです。
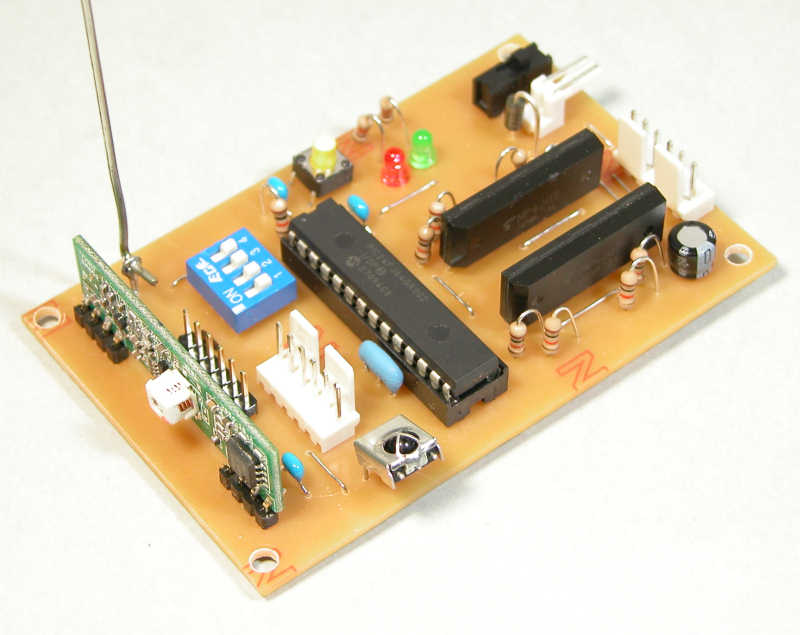
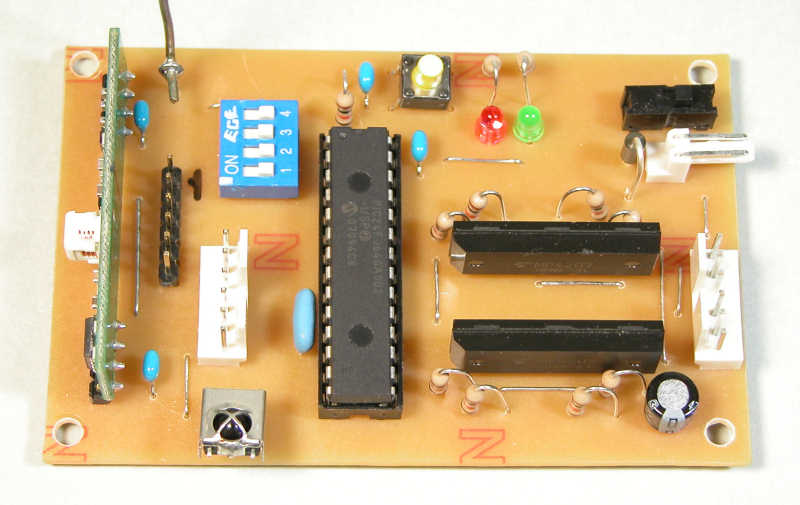
【外観】
制御部の外観は下図のようになっています。
左端が無線受信モジュール
AM方式の315MHz帯用です。
右側が2個のFETアレイです。
モータドライバがFETアレイだけに
なったので、非常にすっきりした
構成となりました。
3端子レギュレータとパスコン
だけが実装されています。
【プログラム概要】
プログラムはMPLAB C30のフリー版のCコンパイラですべて作成しました。
受信データは2個のモータの回転方向と回転速度データとして直接送られて
くるので、受信したデータをそのままPWMのデューティ値として設定するだけ
です。
DIPスイッチによりいくつかのモードで動作するようにしています。
1.モータテストモード :
一定間隔でモータの回転数を上昇し、最高速度までいったら逆転させて
同じように速度を上昇させることを繰り返します。
2.無線ラジコンモード
無線受信モジュールによるラジコン制御です。他のページにある
加速度センサ式リモコン送信機か、ジョイスティック式リモコン送信機と
組み合わせて使います。
3.赤外線リモコンモード
ジョイスティック式リモコン送信機と組み合わせて使います。
4.ライントレーサモード
ライン_レーサとして動作します。
5.予備