ジョイスティック式リモコン送信機
ジョイスティック式リモコン送信機 ジョイスティック式リモコン送信機
【概要】
操作部にジョイスティックを使ったラジコン車用のリモコン送信機です。
先のラジコン車と組み合わせて使います。
ジョイスティックのセンサ部はボリュームと同じですから、これに電圧を
加えてジョイスティックのX、Y位置を電圧変化として取り出します。
電圧は電源電圧と0Vの範囲で変化しますから、そのままA/Dコンバータ
の入力にできますので簡単な回路で構成でき小型にできます。
無線送信と赤外線送信のいずれかを切り替えて使えるようにしました。
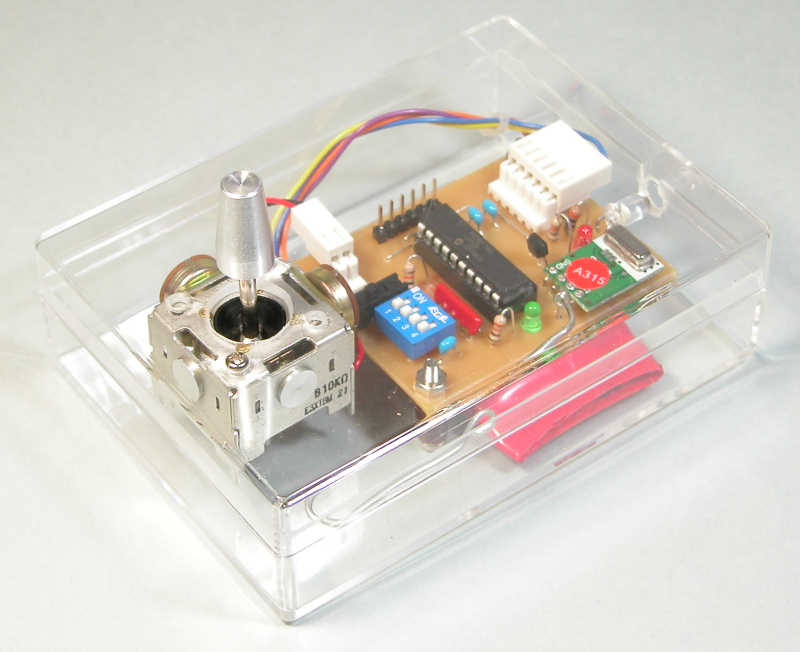
外観は下図のようになります。
【全体構成】
ジョイスティック式リモコン送信機の全体構成は下図のようになります。
PIC16F785を使っていますが、ジョイスティックの入力にはオペアンプは
使わず、そのままPICに直接入力しています。
出力は無線と赤外線の両方が使えるようにし、DIPスイッチでモードを
切り替えできるようにしています。
【回路構成】
上記構成に基づいて作成した回路図が下図となります。
右側にジョイスティックの入力用のコネクタがあり、これにはアナログ、
デジタルいずれかの入力が4チャネルまで可能となっています。
無線送信モジュールはRB6に接続し、ソフトウェアUARTで制御しています。
赤外線発光ダイオードは40kHzの変調が必要ですから、CCP1を40kHzのPWM
モードで動作させ、CCPをオンオフすることで1,0のビット出力とし、ソフトウェア
UARTの方式でデータ送信をしています。1ビットの幅を600usecとしていますので
1667bpsということになります。
電源は、リチウムイオン充電池の3.7Vを直接供給することとし、バイパス
コンデンサのみとしています。
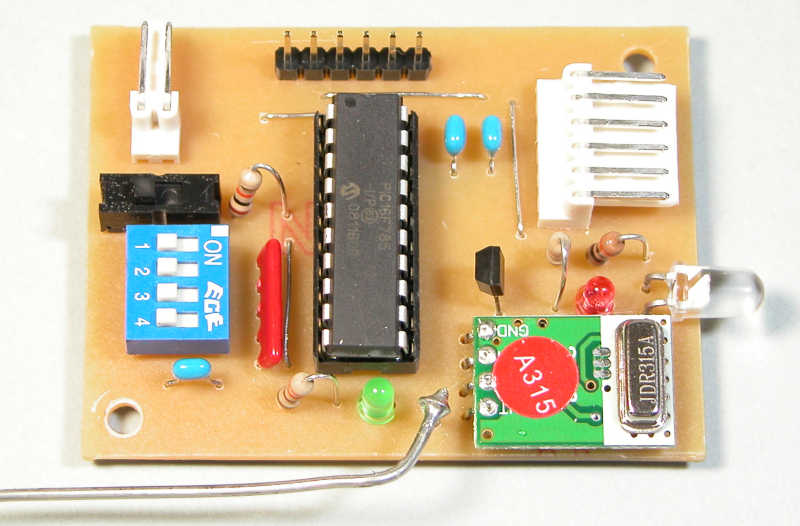
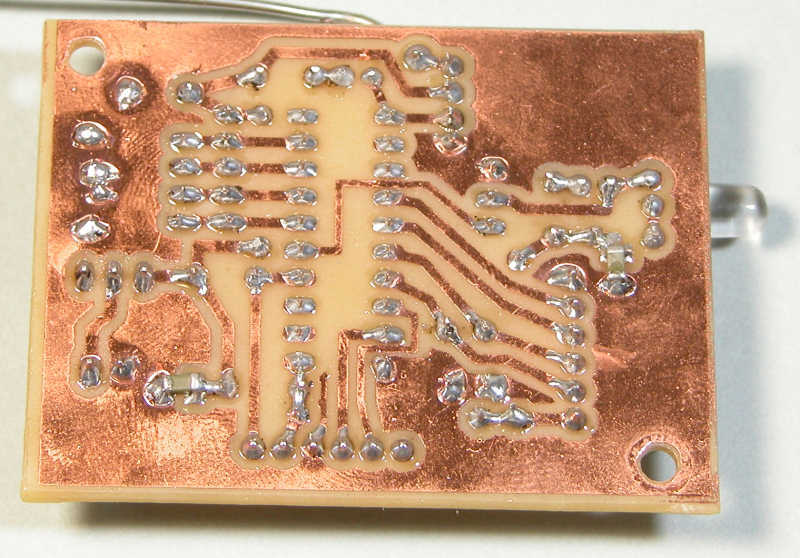
【外観】
製作した制御ボードの外観は下図のようになります。PICだけで
大部分構成されていますから、簡単で小型にできています。
はんだ面側にもバイパスコンデンサだけで他には何もありません。
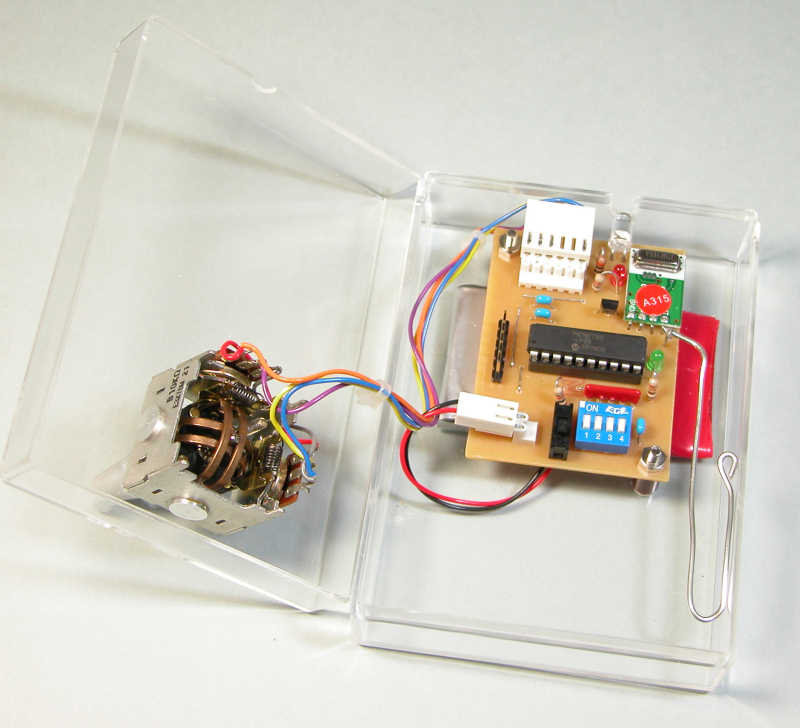
使用したジョイスティックはツバメ無線製の小型のものを使いました。
X軸とY軸に可変抵抗があり、
これで両軸の変化量を検出します。
つまみはばねで常にセンターに戻る
ようになっています。
j全体の実装状態は下記のようになっています。
【プログラム概要】
プログラムは単純な流れでできていますが、DIPスイッチにより
無線と赤外線を切り替えています。
送信データは2個のモータの速度制御データだけとしますので、
ジョイスティックのデータを下記のように使っています。
X軸
速度制御用とし、0x200を境に、大きい場合は前進小さい場合は
後進とし、0x200との差を速度値としています。
Y軸
旋回制御用として使用し、0x200を境にして右旋回と左旋回を
切り替えています。
旋回そのものは、片側のモータをY軸の値に応じて減速することで
行うようにしています。
これで2個のモータの方向と10ビットの速度データとして送信します。
送信には無線は1200bpsのソフトウェアUARTとして出力し、
赤外線はPWMパルス出力のオンオフでソフトウェアUARTと同じ形式
のデータ出力としています。
★★★ ジョイスティック式リモコン プログラムファイル一式