亂戞俆夞忣曬岎姺夛奣梫亃
奐嵜擔帪丂丂侾俋俋俋擭俆寧俀俀擔丂AM11:00乣PM6:00
奐嵜応強丂丂愳嶈巗丂拞尨丂儅僀僋儘傾僾儕働乕僔儑儞儔儃撪
弌惾幰丂丂丂彫愳丂峎
丂丂丂丂丂丂曅嶳丂挭
丂丂丂丂丂丂棊崌丂岾婌
丂丂丂丂丂丂壛摗丂桬
丂丂丂丂丂丂弌塤丂寬嶰
丂丂丂丂丂丂崟戧丂尗帯
丂丂丂丂丂丂彫栰帥峃岾
丂丂丂丂丂丂桳堜丂抭嵠
丂丂丂丂丂丂徏壠丂岝梇
丂丂丂丂丂丂嵅摗丂惉
丂丂丂丂丂丂崅栘丂旤孧
丂丂丂丂丂丂妬扟丂埳暯
丂丂丂丂丂丂愳懞丂峗擵
丂丂丂丂丂丂屻娬丂揘栫
丂丂丂丂丂丂杧丂峗堦榊
丂丂丂丂丂丂戝摗丂崃峅
丂丂丂丂丂丂拞懞丂岾帯
丂丂丂丂丂
亂傑偲傔亃丂
丂戞俆夞偺忣曬岎姺夛偼丄屵慜拞偵CCS幮偺C僐儞僷僀儔偺儈僯僙儈僫
傪彫愳偝傫偺島巘偱奐嵜偟傑偟偨丅捈愙C尵岅偱偺僾儘僌儔儈儞僌傪宱尡
偡傞婡夛傪帩偮偙偲偑偱偒丄懄僐儞僷僀儔峸擖偵憱偭偨曽傕偄傜偭偟傖偄
傑偟偨丅
屵屻偼丄偄偮傕偺傛偆偵惢嶌昳偺徯夘傪偟傑偟偨偑丄崱夞傕懡偔偺嶌昳
偑帩偪崬傑傟奆偱妝偟偔忣曬岎姺傪峴偄傑偟偨丅
偦偺拞偱傕丄棊崌偝傫偑徴摦揑偵攦偭偰偟傑偭偨偲偄偆儗僑幮偺儅僀儞僪
僗僩乕儉傪帩偪崬傫偱棃偨堊丄奆偙傟偵偼傑偭偰偟傑偄丄偄偮傕傛傝抶偔
傑偱柌拞偱梀傫偱偟傑偄傑偟偨丅
崱夞傕僄儞働僀偝傫傗彫愳偝傫偐傜僾儗僛儞僩傪捀偒丄奆偝傫偱桳傝擄偔
暘偗傑偟偨丅
傑偨丄帺幮偺僗儁乕僗傪夣偔採嫙偟偰捀偄偨丄俵俙俴偺彫愳偝傫偵偼
怱傛傝偍楃怽偟忋偘傑偡丅
乻嶲壛幰幨恀乼
丂丂妬扟巵丂桳堜巵丂壛摗巵丂彫愳巵丂杧巵丂愳懞巵丂棊崌巵
丂丂丂丂丂丂丂丂丂丂丂嵅摗巵丂丂丂丂崟戧巵丂丂丂丂弌塤巵丂丂丂曅嶳巵
丂丂丂丂丂丂丂丂丂彫栰帥巵丂丂拞懞巵丂丂崅栘巵丂丂徏壠巵
僗僫僢僾幨恀偱偡丅丂搑拞偱戝摗偝傫偑嫃側偔側傝傑偟偨丅
亂嶌昳徯夘亃
(1) 壛摗丂桬巵丂乮僼僢僩儅僂僗乯
丂丂帺暘偱揹巕婡婍奐敪夛幮傪宱塩偝傟偰偍傝丄崱夞帋嶌惢昳偱偁傞
丂丂乽僼僢僩儅僂僗乿傪愢柧偟偰壓偝偄傑偟偨丅
丂丂柤慜偺捠傝懌偱憖嶌偡傞儅僂僗偱丄慜屻嵍塃傊偺摦偒傕僗僀僢僠偺
丂丂婡擻傕曅懌偩偗偱弌棃傞桪傟傕偺偱偡丅
丂丂拞枴偺惂屼偼PIC16C711偱峴傢傟偰偍傝丄X,Y偺埵抲傪傾僫儘僌偱
丂丂庢傝崬傒丄儅僂僗怣崋偵曄姺偟偰僷僜僐儞偵弌椡偡傞傛偆偵側偭偰
丂丂偄傑偡丅懌偱嫮偔抂偵摦偐偡偲儅僂僗偺摦偒偑懍偔側傞側偳丄側偐側
丂丂偐椙偔峫偊傜傟偰偄傑偡丅傕偆偡偖惢昳壔偝傟攧傝弌偝傟傞偲偐丅
丂丂悢懡偔偺堄尒偑弌偝傟丄傑傞偱怴彜昳偺昡壙夛媍偺條偱偟偨丅丂
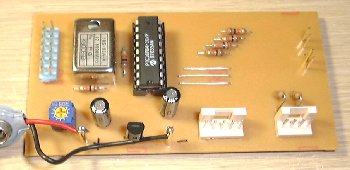
壓恾偺嵍懁偺婎斅晹偵PIC16C711
偑搵嵹偝傟偰偄傑偡丅
拞墰偺崟偄斅偺忋偵懌傪忔偣偰
慜屻嵍塃偵摦偐偡偙偲偱儅僂僗
摦嶌傪偟傑偡丅
丂
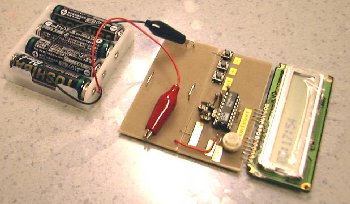
(2) 桳堜丂抭嵠巵丂乮悈幙戺搙寁梡昞帵婍乯
丂丂奀梞娤應婡婍傪偍巇帠偵偝傟偰偄傞偲偄偆偙偲偱丄悈幙應掕婡婍偺
丂丂帋嶌昳偩偦偆偱偡丅丂娵偄崟偄屌傑傝偑墭戺僙儞僒偱丄偦偺戺搙傪
丂丂昞帵偡傞儐僯僢僩偵PIC傪墳梡偟偰偄傑偡丅
丂丂僙儞僒偺傾僫儘僌怣崋傪旕忢偵崅偄暘夝擻偱僨傿僕僞儖曄姺偡傞
丂丂昁梫偑偁傞偨傔丄奜晅偗偺A/D僐儞僶乕僞傪巊偭偰庢傝崬傒丄
丂丂俆寘偺僙僌儊儞僩敪岝僟僀僆乕僪偱抣傪昞帵偟偰偄傑偡丅偙偺昞帵婍
丂丂偺惂屼偵PIC16F84傪巊偭偰偄傑偡丅
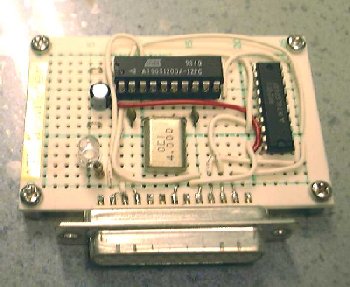
(3) 彫栰帥 峃岾巵乮帪寁丄SX丄ATMEL梡儔僀僞乯
丂丂媣偟傇傝偵嶲壛偝傟偨巵偱偡偑丄崱夞偼揹巕帪寁傪Microchip幮偺
丂丂PIC16F84偲丄SCENIX幮乮戙棟揦丂廧彜僨僶僀僗乯偺SX僔儕乕僘偺
丂丂椉曽偱摦嶌妋擣傪偟偰壓偝偄傑偟偨丅丂傎偲傫偳摨偠僾儘僌儔儉偺
丂丂傑傑偱椉曽偲傕摦嶌偟偰偄傑偟偨丅
丂丂偨偩偟丄SX僔儕乕僘偺曽偼揹尮揹埑偵僔價傾側條偱丄俆V傪嫙媼
丂丂偟偰傗傞昁梫偑偁傞偲偺偙偲偱偟偨丅PIC16F84偼3.6V偺僈儉揹抮
丂丂偱廫暘埨掕偵摦嶌偟偰偄傑偟偨丅乮悈徎怳摦巕偼俁俀KHz乯
丂
丂丂PIC儔僀僞偺懳徾僠僢僾偵SX僔儕乕僘傪壛偊丄偝傜偵丄傾僩儊儖幮偺
丂丂儅僀僐儞偵傕懳墳偟偰壓偝偄傑偟偨丅
丂丂偄傢備傞僷儔儗儖僞僀僾偺PIC儔僀僞偵壓婰幨恀偺傛偆偵丄偪傚偭偲
丂丂奜晅偗偺晹昳傪捛壛偡傞偩偗偱丄3捠傝偵懳墳偱偒傞儔僀僞偵側傞
丂丂偦偆偱偡丅
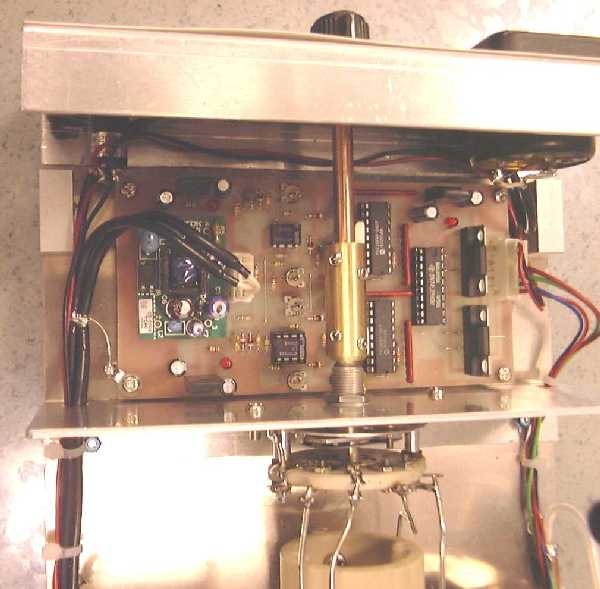
丂丂偙偙偱丄屻娬偺曽偐傜傕丄揹巕帪寁傪徯夘偟傑偟偨丅丂崅惛搙偺帪寁
丂丂偲偡傞偨傔偵丄侾俀丏俉MHz偺崅惛搙僋儕僗僞儖敪怳儐僯僢僩傪巊偄丄
丂丂偙傟偱捈愙PIC16F84傪僪儔僀僽偟偰偄傑偡丅偪傚偭偲僆乕僶乕僪儔僀僽
丂丂偱偡偑丄慡偔栤戣柍偔摦嶌偟傑偡丅
丂丂偙偺儐僯僢僩偺廃攇悢傪旝挷惍偡傞偙偲偱丄寧嵎侾侽昩掱搙偺惛搙偵
丂丂偡傞偙偲偑壜擻偱偡丅
忋恾偺嬥懏働乕僗偑崅惛搙悈徎
敪怳儐僯僢僩偱偡丅
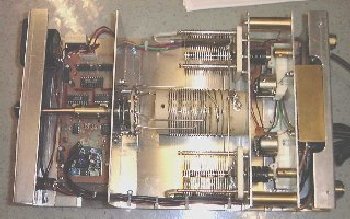
(4) 棊崌 岾婌乮儘儃僢僩乯
丂丂棊崌偝傫偺掕斣偲側偭偨儘儃僢僩偱偡丅丂崱夞偼慜乆夞偵偛徯夘偟偰
丂丂捀偄偨儘儃僢僩偱偡偑丄姰摦偝偣偨偺偲丄昗揑偲側傞儘儃僢僩偵崱夞偺
丂丂栚嬍偱偁傞丄儗僑幮偺儅僀儞僪僗僩乕儉傪巊偭偨偙偲偑怴偟偄帋傒偺
丂丂傕偺偱偡丅
丂丂偙偺昗揑儘儃僢僩偼丄摉擔偺挬弌偑偗偵僾儘僌儔儈儞僌偟偰棃偨偲偺
丂丂偙偲丄儅僀儞僪僗僩乕儉偺姰惉搙偺崅偝傪楢憐偝偣傑偡丅丂丂
丂丂儘儃僢僩偺曽偼丄PIC16F84偱儌乕僞偺僒乕儃惂屼傪峴偄丄PIC16C77
丂丂偱慡懱偺惂屼傪偟偰偄傞偲偺偙偲丅寢峔戝偒側僾儘僌儔儉偲側偭偰偄傞
丂丂條偱偡丅
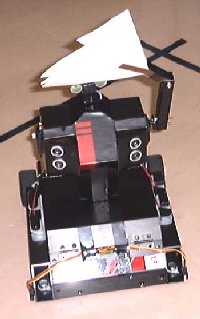
偙偺俀偮偺儘儃僢僩傪巊偭偨嫞媄偼丄壓恾偺傛偆側崟偄僥乕僾偱埻
傑傟偨嫞媄僄儕傾傪弌側偄傛偆偵偟側偑傜丄昗揑儘儃僢僩傪敪尒偟
捛偄偐偗丄摢偺晹暘傪偨偨偄偰墴偟偰昗揑儘儃僢僩傪掆巭偝偣傞偲
偄偆傕偺偱偡丅
僄儕傾偐傜弌側偄傛偆偵愒奜慄僙儞僒偱崟僥乕僾傪専抦偟曽岦傪
曄偊傑偡丅昗揑偺扵嶕偼俀慻偺挻壒攇僙儞僒偱斀幩嫍棧傪應掕
偡傞偙偲偱嬤偯偄偰峴偒丄僴儕僙儞傪帩偭偨榬傪壓偘傞偙偲偱昗揑
偺摢傪扏偒傑偡丅
(5) 彫愳丂峎巵乮愒奜慄嫍棧寁乯
丂丂愒奜慄傪巊偭偨嫍棧僙儞僒傪墳梡偟偨嫍棧寁偱偡丅偙偺僙儞僒偼
丂丂侾倣掱搙傑偱偺嫍棧傪應掕偟偨傝丄暔懱偺桳柍傪敾掕偟偨傝偡傞婡擻
丂丂傪帩偭偰偍傝丄弌椡偼嫍棧偵墳偠偨傾僫儘僌揹埑偲側偭偰偄傑偡丅
丂丂偙傟傪PIC偺A/D曄姺偱僨傿僕僞儖僨乕僞偵曄姺偟偨偁偲丄嫍棧抣偵
丂丂姺嶼偟偰塼徎昞帵婍偵昞帵偟偰偄傑偡丅
(6) 弌塤 寬嶰巵乮傾儞僥僫帺摦摨挷僇僾儔乯
丂丂傾儅僠儏傾柍慄傪庯枴偲偟偰偄傞弌塤偝傫偐傜偼丄傾儅僠儏傾柍慄梡偺
丂丂傾儞僥僫帺摦摨挷僇僢僾儔偺徯夘偑偁傝傑偟偨丅岤庤偺傾儖儈斅傪嬋偘偰
丂丂嶌偭偨働乕僗偼丄巵偺傾儅僠儏傾嵃傪姶偠傞弌棃塰偊偱偟偨丅
丂丂尨棟偼丄傾儞僥僫偺SWR偲斀幩傪應掕偟丄僀儞僺乕僟儞僗挷惍梡偺
丂丂僶儕僐儞傪儌乕僞偱夞揮惂屼偡傞偲偄偆僼傿乕僪僶僢僋惂屼偱峴偭偰偄傑偡丅
丂丂偙偺僼傿乕僪僶僢僋惂屼偵PIC16F84傪巊偭偰偍傝丄SWR偲斀幩攇偺俀抣傪
丂丂摨帪偵嵟揔壔偡傞傛偆偵側偭偰偄傑偡丅
丂丂偙偺僇僾儔偺摿挜偼堦搙摨挷傪庢傟偽丄偁偲偼揹尮傪愗偭偰傕摨偠埵抲
丂丂傪曐帩偡傞偲偄偆偙偲偱偡丅
丂丂SWR寁偺偲偙傠偼丄僇僢僩傾儞僪僩儔僀偱憡摉嬯楯偝傟偨條偱丄嬯楯偺愓偑
丂丂偟偺偽傟傞拞枴偱偟偨丅丂

丂丂丂丂丂丂丂丂丂丂丂拞枴慡懱丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂惂屼婎斅晹
丂幚嵺偵摦嶌偝偣偰偄傞偲偙傠丂丂丂丂丂丂丂丂SWR偲斀幩攇偺僨乕僞庢傝弌偟晹
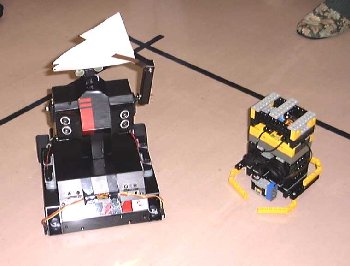
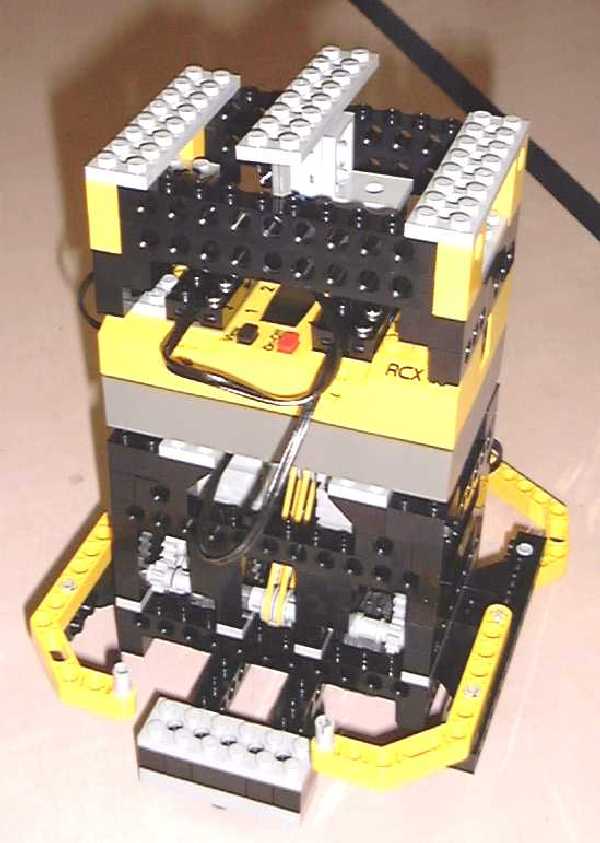
(7) 棊崌 岾婌乮儅僀儞僪僗僩乕儉乯
丂偄傛偄傛杮擔偺杮柦偺儗僑幮偺儅僀儞僪僗僩乕儉偺搊応偱偡丅
丂棊崌巵偑婥偑晅偄偨傜攦偭偰傇傜壓偘偰曕偄偰偄偨偲偄偆戙暔偱
丂巕嫙偺偍傕偪傖偲偄偆傛傝丄戝恖偑柌拞偵側偭偰偟傑偆偍傕偪傖
丂偱偡丅丂壓恾偺RCX偲偄偆僐儞僩儘乕儔偵偼丄擔棫偺H8偲偄偆
丂儅僀僐儞偑巊傢傟偰偄傞偲偺偙偲丅偄偔偮偐偺僙儞僒偲儌乕僞
丂傪愙懕偟偰惂屼偡傞偙偲偑弌棃傑偡丅
丂摦偐偟偐偨偼僷僜僐儞偱娙扨偵僾儘僌儔儈儞僌偱偒傞僜僼僩
丂僂僃傾偑梡堄偝傟偰偍傝丄愒奜慄捠怣偱RCX偵揮憲偟偰撈棫摦嶌
丂傪偝偣傞偙偲偑弌棃傑偡丅
寢嬊丄嵟屻偼帺暘偨偪偑梀傇偙偲偵側偭偰偟傑偄傑偟偨丅
偙傟偱夝嶶帪娫傪戝暆偵僆乕僶乕偟丄廩幚偟偨堦擔傪夁偛偡
偙偲偑弌棃傑偟偨丅
(8) 偦偺懠偺曽乆
丂丂嶌昳傪徯夘壓偝偭偨曽乆偺懠偵奆偝傫嫽枴堦攖偱嵟屻傑偱恀寱偵
丂丂暦偄偨傝幙栤偟偨傝偝傟偰偄傑偟偨丅
丂丒嵅摗丂惉巵
丂丂丂寶暔偺怳摦傪應掕偡傞偙偲傪偍巇帠偵偝傟偰偄傞偲偺偙偲丅
丂丂丂嵟嬤偼僱僢僩儚乕僋宱桼偱僨乕僞傪廂廤偱偒傞傛偆偵側偭偰偄偰
丂丂丂妛弍栚揑側偳偵帺桼偵巊偊傞傛偆偵側偭偰偄傞偦偆偱偡丅
丂丒戝摗 崃峅巵
丂丂丂僴乕僪僂僃傾愝寁傪帺塩偱傗傜傟偰偄傞偲偺偙偲丅摉擔傕揙栭柧偗
丂丂丂偲偄偆偙偲偱丄搑拞偱懱挷傪偔偢偝傟偨偨傔婣戭偝傟傑偟偨丅
丂丂丂僒乕儃傗儔僕僐儞偑摼堄偲偺偙偲偱偟偨丅徯夘梊掕偺嶌昳偑偁偭偨
丂丂丂偺偱偡偑弌棃偢偠傑偄偱偟偨丅師夞傑偨偍懸偪偟偰偍傝傑偡丅
丂丒妬扟丂埳暯巵
丂丂丂戝宆儖乕僞偺僜僼僩奐敪傪偝傟偰偄傞偲偺偙偲丅
丂丂丂愄丄LKIT側偳偺儅僀僐儞偱梀傫偩偙偲偐傜偦偺傑傑巇帠偵側偭偰
丂丂丂偄傞偦偆偱偡丅
丂丒愳懞 峗擵
丂丂丂偢偭偲懕偗偰嶲壛偝傟偰偄傞忢楢儊儞僶乕偱偡丅
丂丒拞懞丂岾帯巵
丂丂丂擔杮岺嬈戝妛偺妛惗偝傫丄偢偄傇傫曌嫮偵側偭偨偺偱偼丅
丂丒曅嶳丂挭巵
丂丂丂報嶞偺DTP傪帺塩嬈偱傗偭偰偄傞偲偺偙偲丅儘儃僢僩偵嫽枴偑偁傞偲
丂丂丂偄偆偙偲偱丄嵟屻傑偱儅僀儞僪僗僩乕儉偵挘傝晅偄偨傑傑丅
丂丂丂偒偭偲傕偆攦偭偪傖偭偰偄傞偺偱偼丠
丂丒杧 峗堦榊巵
丂丂丂嬍愳戝妛偺妛惗偝傫丅彫愳偝傫偑傾僪僶僀僓乕傪偟偰偄傞娭學偱
丂丂丂僋儔僽偵擖夛丅
丂丒徏壠 岝梇巵
丂丂丂偢偭偲嶲壛偝傟偰偄傞忢楢偺僾儕儞僩婎斅夛幮偺幮挿偝傫丅
丂丂丂傗偼傝嵟屻傑偱儅僀儞僪僗僩乕儉偵怗偭偰偄傜偭偟傖偄傑偟偨丅
丂丒崟戧丂尗帯巵
丂丂丂夛幮偱傕壗偱傕壆偲偄偆偙偲偱丄TK80偐傜偢偭偲怗偭偰偄傞偲偺偙偲丅
丂丂丂崱偼僆乕僨傿僆憰抲偑庯枴偺悽奅偲偺偙偲偱丄僩儔儞僗偺愝寁偐傜
丂丂丂偡傞偲偐丅儅僯傾偱偡偹丅
丂丒崅栘丂旤孧巵
丂丂丂巵傕忢楢儊儞僶乕偱偡丅丂僾儘僌儔儈儞僌偵栚妎傔偨偲偐丅