【第6回情報交換会概要】
開催日時 1999年9月15日 PM1:00〜PM5:30
開催場所 川崎市 中原 マイクロアプリケーションラボ内
出席者 小川 晃
矢野 百人
柏原 俊之
井村 裕
大橋 理恵
松家 光雄
大藤 眞弘
高木 美勲
福士 幸弘
木皿 直規
小野寺康幸
落合 幸喜
後閑 哲也
【まとめ】
第6回の情報交換会は、初の女性の参加がありました。それぞれの
製作品の紹介だけで、あっという間の4時間でした。
また、自社のスペースを快く提供して頂いた、MALの小川さんには
心よりお礼申し上げます。
《参加者写真》
すいません!
幹事の不手際で皆さんの写真を撮るのを忘れてしまいました。
−−−−−−−−−−−−−−−
−−−−−−−−−−−−−−−
【作品紹介】
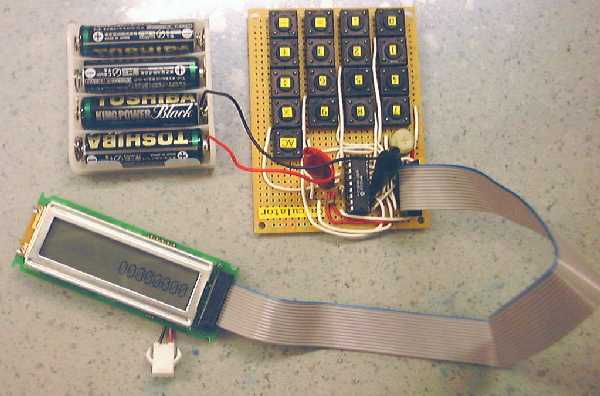
1.F84による電卓 : 小野寺さん
PIC16F84を使って製作した8桁電卓です。浮動少数は扱えませんが
立派に計算できます。
キーは全部で16個もあり、そのままでは入出力ピンが不足してしまう
ので、ダイナミックスキャンでキーの入力をチェックしています。
さらに液晶表示器の出力もポートを共有して、ポートの入出力モード
をダイナミックに切替ながら制御しています。
キーのチャッタリングが長く、その対策に苦労されたとのことでした。
キーボードと液晶表示器
それと本体から出来ています。
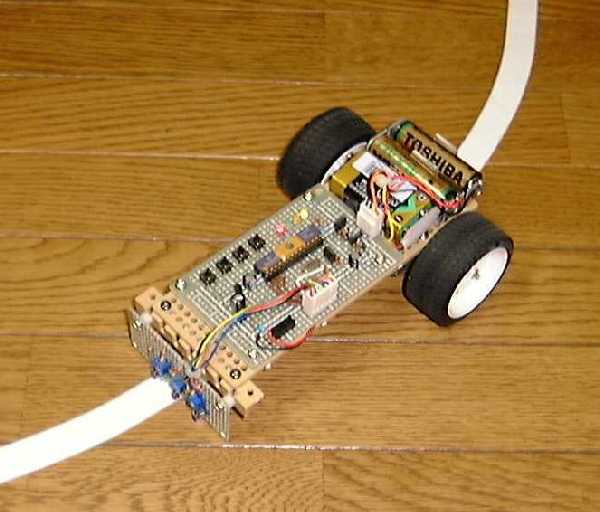
2.ライントレースカー : 後閑
PIC16C73を使った白いテープのラインをトレースしながら走行する車です。
工作のし易い市販の製品だけで車体と駆動部を構成し、制御部とセンサ
部を汎用の穴明き基板で製作しています。
プログラムは全てCCS社のC言語で作成しています。ラインをトレースする
能力は余り高くなく、ふらふらと曲がりながら走行します。
モータの速度制御にPICの内蔵CCPモジュールのパルス幅制御機能を
そのまま使って2個のモータの速度制御をすることで進む方向の制御を
しています。
白色のテープをトレースしながら
走行する。
ふらふらと曲がりながらトレース
します。
上側が制御部でPIC16C73を
使っています。
前面がセンサ部で赤外線の反射型センサ
を3個使っています。
ボリュームは感度調整用です。
電源は制御部用に9V、モータ用に3V
の電池で2種類使っています。
車体、駆動部は全てタミヤの
工作キットを流用しています。
前輪は小型のキャスターです。
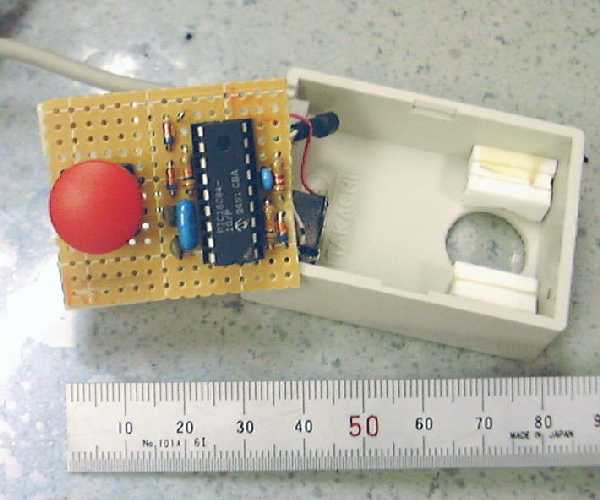
3.障害者用パソコン再起動装置 :福士さん
手足の不自由な障害者がパソコンを使っている時、パソコンを何らかの
目的で再起動したいときに、マウスでなく、大型のボタンなどを押すだけで
出来るようにした装置です。小型ですが、内部にPIC16F84が実装されて
いて、これでCTL+ALT+DEL相当のキーコードを出力したり、Windowsの
操作用に、ESC、TAB、RETURNキーのコードを出力するものもあるそう
です。
小型ですが内部にPICが実装されています。
これをキーボードのコネクタに接続すれば
再起動の制御をボタン1個の操作だけで
できるようになります。
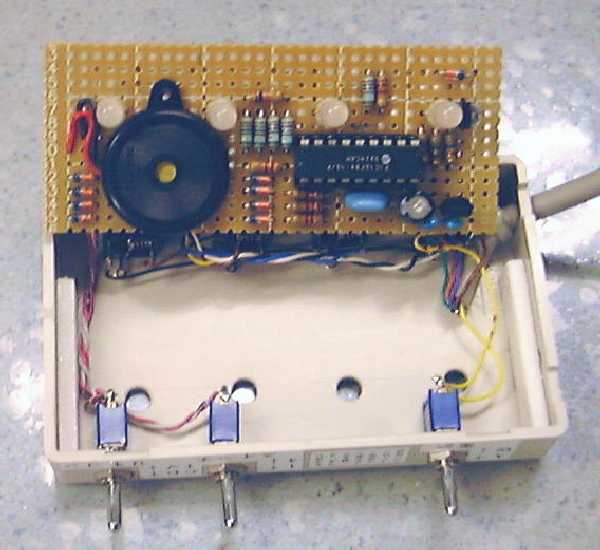
これは右側の汎用リモコンを大型のボタン
4個で制御できるようにした装置です。左の
小さな箱に4個の大型スイッチが接続
できるようになっており、それを押すことで
特定のリモコン操作が出来るようにします。
どの操作をするかも設定が出来ます。
上記リモコンの制御装置の中身です。
やはりPIC16F84が入っており、これで
特定の信号を汎用リモコンに送るように
なっています。
4.ラジコンラップタイマー :矢野さん
オフロードのラジコンレースでラップタイムを自動計測するための
装置で、低周波(4kHz)の無線による検出方式を使ったユニークな
ものです。
親機のアンテナに相当するループ線をゴールに這わせておき、その
ループ線に4kHzの信号を常時加えておきます。
そこを子機を積んだラジコンカーが通過すると、子機が親機の信号を
検知し、PICでフィルタリング処理をして間違い無く信号だと検出したら、
親機に向けて無線信号を出力します。これを親機が別のアンテナで
受信してラップタイムのトリガにして時間計測をします。
ループアンテナを通る周波数が4kHzと低いため、通過検知の範囲を
狭く出来、正確な通過を検出することが出来ます。
市販の数十万円もするラップタイマ計測装置と比べても遜色無い性能
だということです。
ここでのPICは、4kHzの信号を受信したとき、そのパルス幅を監視して
間違い無く4kHzの信号が一定個数受信できたということをチェックする
ために使われています。
(写真を撮り忘れてしましました。すいません)
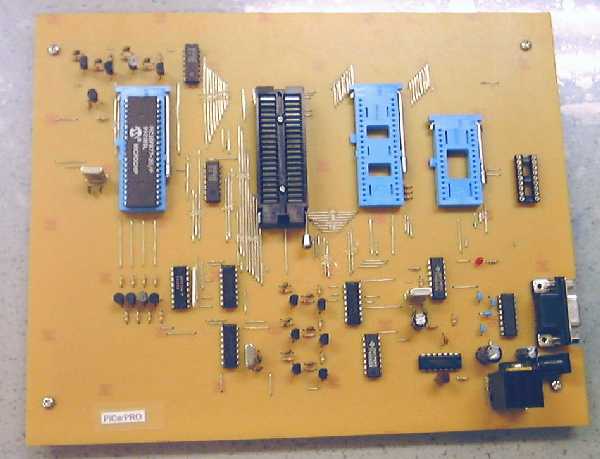
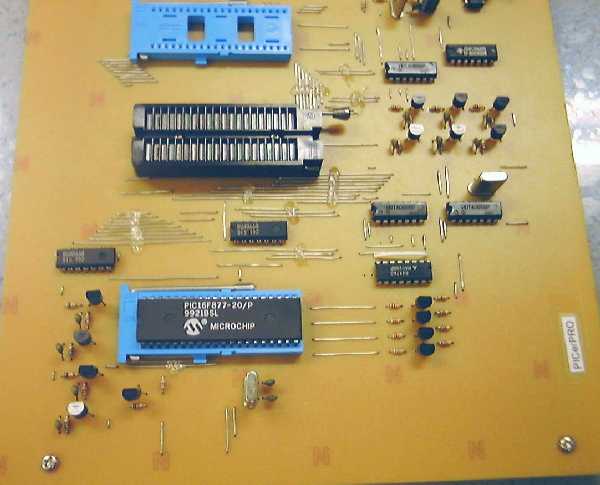
5.PICスーパーライタ : 小野寺さん
PIC用ライタですが、Microchipの全てのシリーズだけでなく、SCENIX社
のSXシリーズや、アトメル社のAVRシリーズにも対応するとのこと。
何でも来いのライタです。
もう少しで完成する段階とのことですが、これは市販の製品として売れ
るのではということで盛り上がりました。
制御部の中心はPIC16F877が使われており、パソコンとの接続は
シリアルインターフェースへの接続となっています。
大型の基板に全てが実装されています。
アマチュア工作でこれだけ大型の基板
を作るのは大変ですね。
全体の制御はPIC16F877です。
6.大型サーボ : 大藤さん
ラジコンに使われるサーボをそのまま大型にしたような装置です。
製品として量産中とのことでした。
一般にラジコンのサーボは、繰り返し周期20msecで、パルス幅が1.1〜
1.9msec(1.5±0.4msec)のパルスで制御されています。
このパルス幅がサーボの位置に比例しています。
ところがこれをそのまま使ったサーボでは、20msec周期でしか位置修正
制御が出来ないため、その間の外力には修正制御がかからず、見かけ上
制御トルクが小さくなってしまいます。
そこで、ここにPICを使ってプログラムでパルス幅を検出し、それに比例した
周期のパルス幅制御を20msecより遥かに高速の周期で実行することで、
修正制御が高速で繰り返されることになり、外力が加わっても直ぐ補正力が
働くので、外力に対し見かけ上大きなトルクで制御しているようになります。
さらに、制御の仕方に台形制御や、反転急ブレーキ制御などの工夫を
凝らして、指定された位置に高速で移動し、かつぴったりのところで即停止
するということを実現しています。
これまでに16ビットや32ビットのマイコンで多くの実験をした結果、
量産のためにコストを下げる目的でPIC16C710を使われているとのこと
でした。
さらにこれの高性能版として、PIC16C73Aを使ったものも開発中とのこと。
サーボなどの制御系はなかなか奥が深い世界ですね。

奥側がサーボ本体です。上に乗っかって
いる部分はギア部分
手前側の基板はデモ用の基板で
ツマミをまわすとそれに比例してサーボが
回転します。
サーボの内部、PICの実装された小型
の基板が見えます。
手前の小型の黒い円筒形のものは
位置検出のための工業用ボリューム
です。
7.ソーラーカー用データロガー部 : 小川さん
玉川学園の競技用ソーラーカーの製作に、小川さんが協力されています。
今回は、主にデータロガーの部分を分担され、PIC16F877を使って、
バッテリの電気量監視やそのたの異常警報監視を収集する部分を製作
されたとのこと、これをパソコンに接続してデータ収集が出来るように
なっています。
プログラムはC言語とアセンブラ言語の混在で作成されたとのこと。
今回の国内での競技は2位に入賞ということで、10月にはオーストラリア
で国際レースに参加されるということです。

8.Easy−PICバージョンアップ : 落合さん
パソコンのパラレルポートに接続するタイプのライタ用ソフトを公開されて
いますが、今回バージョンアップして、対応PICの種類を増やしたとのこと。
公開Webは下記です。
落合氏ホームページ 「K's works」
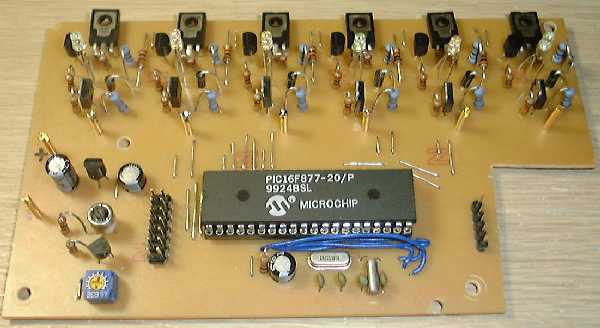
9.NiCdバッテリチャージャ : 後閑
PIC16F877を使ったNiCdバッテリ充電・放電器で、6個のバッテリを個別に
独立で充電制御しています。
バッテリ電圧を10ビットのA/D変換で計測しながら、最適な充電が出来る
ように制御します。
バッテリをホルダにセットするとあとは自動的に放電、充電が制御されます。
個々のバッテリの状態を液晶表示器で監視することが出来ます。
プログラムは、全てCCS社のC言語で作成しました。
本器は別ページで詳細を紹介しています。
6個のNiCdバッテリの充電・放電を制御
状態は液晶表示器で監視
全体の制御はPIC16F877だけで実行
充電、放電はトランジスタで構成