【第13回情報交換会概要】
開催日時 2001年 10月27日 PM1:00〜PM6:00
開催場所 マイクロアプリケーションラボ社
【まとめ】
第13回情報交換会は、やはり25名の方々の参加を頂き、6時近くまで続けられました。
相変わらず初めての方や、常連の方々など多様な方々の集まりとなって来ていて、
それぞれに有意義な時間が過ごせたのではないかと思います。
今回紹介頂いた作品はレベルが高いものが多く、PICだけでなくCPLDや汎用マイコン
が使われていました。全体のレベルが上がって来たことを感じさせるものでした。
また今回初参加の中に、PICNICで有名な落合さんがいらっしゃいました。
《参加者写真》
スナップ
作品のレベルの高さに思わず魅入られてしまうように、皆がテーブルの近くに寄って
作品を覗き込むようにして出来栄えを確認していました。
新登場二足歩行ロボット 新型相撲ロボットに注目
【作品紹介】
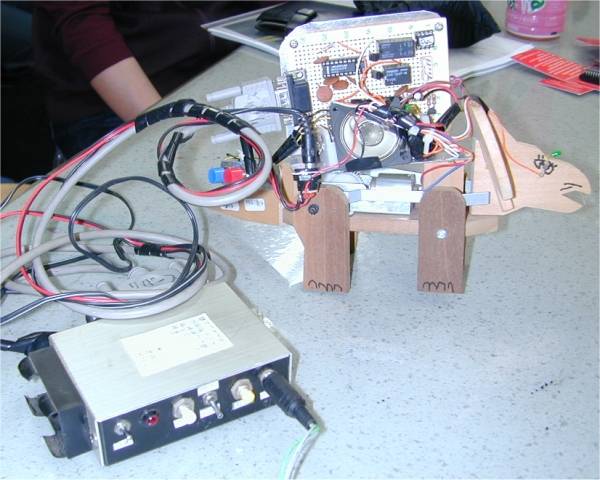
1.怪獣模型:山原さん
模型の怪獣にPICのボードを乗っけてモータの制御と
音を出す。
制御は左下にあるモールス符号発信器で行うリモコン
であることがミソ。
音は基板の右上端にあるPICで生成している。
2.TAと電話機の停電バックアップユニット : 矢野さん
商用電源の停電時にバッテリからTAと電話機に電源を
供給するユニットです。
きれいな板金による仕上がりです。
バッテリ電圧を発光ダイオードで表示し、一定の電圧
になったら供給を停止するというバッテリ保護機構付き。
バッテリ電圧をPICのA/Dコンバータで測定して
LEDのレベル表示と供給回路切断用リレーの制御
を実行している。
ディジスイッチを使って保護電圧の設定を行っています。
下側にあるのが絶縁型のDC/DCコンバータで
これでTA用と電話機用の電源供給を行う。
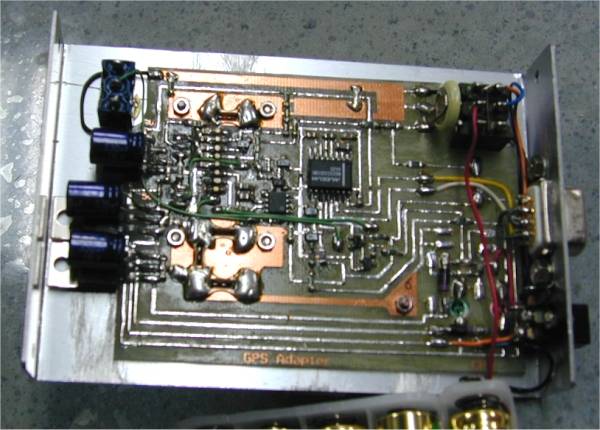
3.GPS受信ユニットとPLL受信ユニット試験機 : 高木さん
GPS受信ユニットからのGPSデータをRS232の
シリアルデータとして出力するユニットです。
GPSユニットの試作実験用に作成したものとのこと。
(内部の基板の出来が良いものだといういうことで
動作では無く静態) 皆このGPS受信ユニットが欲しいと・・・・
内部の基板の出来を見て欲しいという作品で、確かに
表面実装のプリント基板できれいに仕上がっていました。
チューナーユニットの実験用に作成したものとのことで、
PICでPLLのシリアル信号をチューナーユニットに出力
しています。
いろいろな種類のチューナーがコネクタに接続できる
ようにコネクタに工夫がなされていました。
チャネル選択はロータリースイッチで行います。
PLLユニットは秋月電子製を利用していて、PICチップを交換
することでTVとFMと両方に対応出来るようになっています。
オーディオアンプと電源が内蔵されていて、この試験機に
モニタを接続すれば直接TVが見られます。
またFM音楽を楽しむことも出来ます。
4.LEDコントローラ : 佐藤さん
3色発光ダイオードを8ピンのPICで直接点灯制御
しています。60度ずつずれた3相の正弦波レベルの
パルス幅変調をかけたポート出力となっていて
3色のLEDがきれいにクロスオーバーしながら切り替わって
表示されます。
表示の切り替わりがスムースに行われてきれいでした。
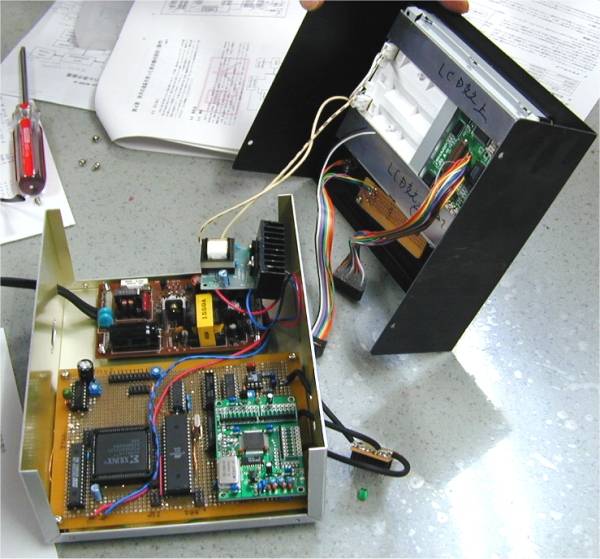
5.周波数特性測定器 : 中井さん
今回初参加の中井さんからオーディオ帯域の周波数特性を液晶表示器にグラフで
表示する測定器の紹介がありました。有名な秋月電子で販売されている320×240ドット
のグラフィック液晶表示器の表示制御をCPLDで実現しています。
表面に見える320×240ドットの液晶表示器に
横軸が周波数、縦軸がレベルのグラフで周波数
特性が表示されます。
この制御はアトメル社のAVRチップで制御されて
います。
内部構成、右側の蓋に液晶表示器が実装され
下側に制御部と電源が実装されています。
右側の制御基板には上から市販DDSキットによる正弦波
出力ユニット、アトメルのAVRチップ、XilinxのCPLDである
XC95108、一番下側にRAMチップが実装されています。
液晶表示器のスキャン制御とRAMのRead/Writeを
CPLDで行います。
AVRはログアンプICの出力をA/D変換ICから読み込んで
編集したグラフデータをCPLD経由RAMに書き込みます。
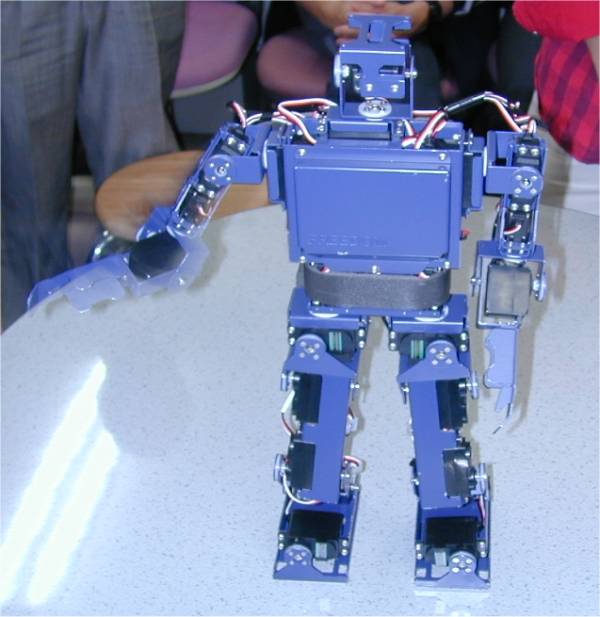
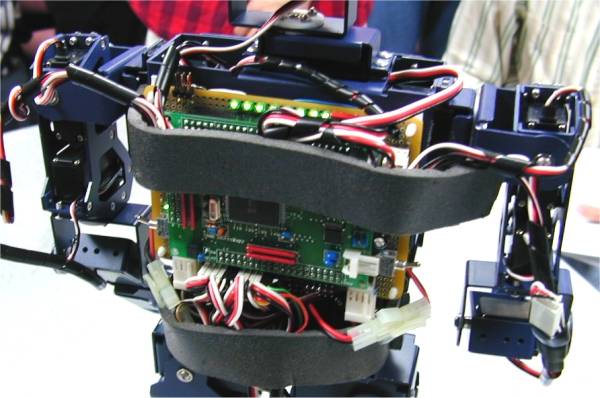
6.二足歩行ロボット : 五味渕さん
いよいよPICクラブにも二足歩行ロボットの登場です
スイッチONだけでいきなり歩き出したので皆「おーー」という歓声があがりました。
駆動部は全てラジコンサーボ(全部で22個使っているとのこと)、制御部はSH2です。
グッと膝の間接を曲げ、片足ずつ上げて前進する
のを見て、皆おーーと歓声でした。
腕を振ったり、方向転換をしたりなかなかの動きを
します。
しかも結構安定に立った姿勢を保っていて完成度
の高さをうかがわせる作品でした。
この歩行にはジャイロなどの難しいセンサーは使って
おらずすべてソフトでのバランスチューニングだけとのこと。
制御部を背中に背負い、電池はお腹の中に内蔵
することで重心を安定に保つようになっています。
関節は全てラジコン用のサーボモータで出来て
いて以外に高速な動作をするので皆ここまでできるのか
という驚きを持って見ていました。
本ロボットは近日市販されるとのことで下記Webを
参照して下さい。
ベストテクノロジー社ホームページ
http://www.besttechnology.co.jp
制御ユニットにはSH-2のマイコンが実装されていますが
以外にすっきりした基板です。この基板から直接サーボ
用の3ピンの信号が何系統も出力されます。
CPUはSH7045Fのマイコンです。
7.エレクトリックキーヤ2点 : 日高さん
アマチュア無線の電信用のエレクトリックキーヤで、
PIC16F877を使って長短の信号の自動生成、判読、長短時間
の調整、CQコールの自動出力などなど数多くの機能を
盛り込んでいます。
カナ文字のトンツーの練習器で、ハムフェアで優秀賞を
頂いたとのこと。
何種類かのテストパターンを順番に練習が出来るようになっており
速度も調整が出来るようになっています。これにもPIC16F877が
使われています。
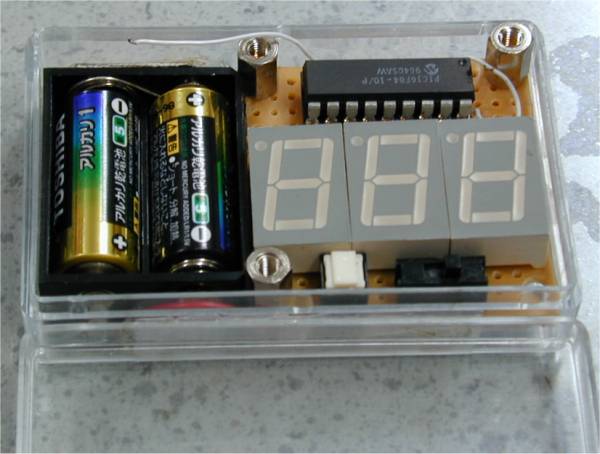
8.無線カード通信時間測定器とPICライタ : 大和田さん
無線による非接触カードを使うとき、一体どれくらいの時間、通信が行われているかを
測定するツールです。
PIC16F84を簡易A/D変換で使い、写真のケース上部にある
白い線材がアンテナとなって、ここに誘起された無線による
電圧を測定することでその継続時間をmsec単位で計測して
セグメント発光ダイオードで数値表示します。
カードのリーダからは1W近くの送信電力が使われていて、
この程度のアンテナで受信できるほどの感度で
通常のカードと同じ程度の受信感度になるとのこと。
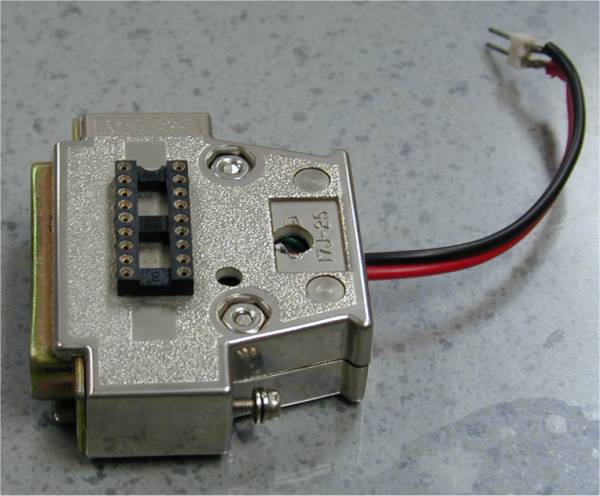
簡易のPIC用のライタで直接これをパソコンのプリンタコネクタ
に差し込んで書き込むことが出来ます。
ノートパソコンには都合が良いですね。
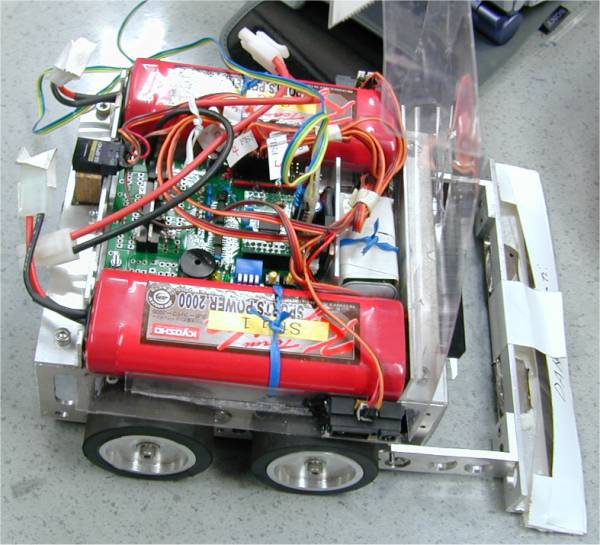
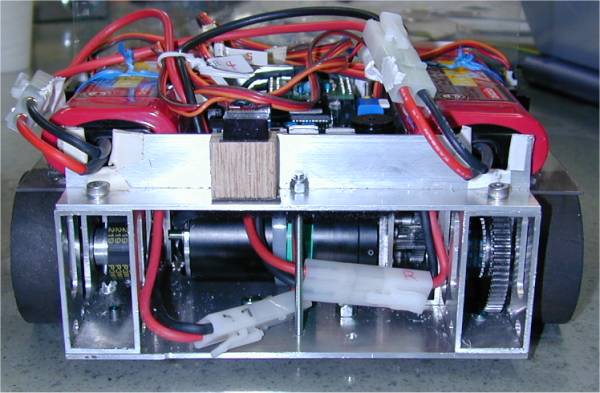
9.相撲ロボット最新作 : 菅原さん、下笹さん
いつもロボットを紹介して頂く菅原さんと下笹さんです。今回は最新の相撲ロボットを
紹介していただきました。ゲームに使われる土俵が鉄板製になったため、なんと
これまでのバキュームによる踏ん張りから、永久磁石による方式に変更になったとのこと。
これまた奇抜なロボットです。
制御部はすっきりしたマイコンボード1枚に全てが実装
されています。前面には鋭い歯をもったブレードが
取り付けられかなりの高速での動作をするとのこと。
そのポイントはモータにありました。
超強力モータで実現した推進力は、人間の力で停止させる
ことは困難というほどのすごさです。
それでもバッテリはNiCd電池です。
その推進力を生み出すモータはしっかり組み上げられた
シャーシの真中に固定されています。
モータは特注品??
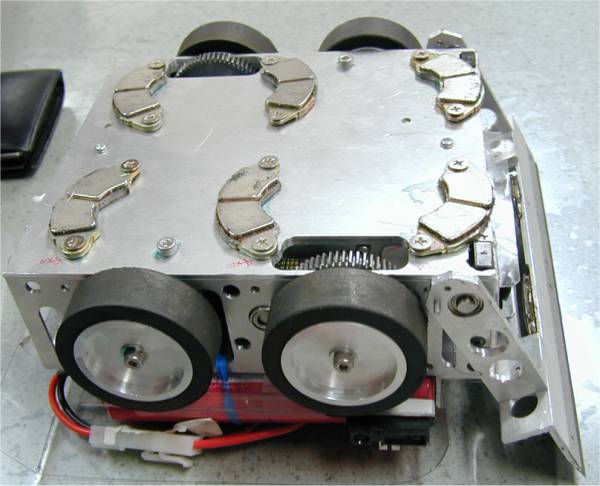
今回のゲームの特徴は鉄板の土俵に吸い付くために
底に取り付けられた永久磁石です。
一度鉄板に置いたら、単純に引っ張っても人間の力で
は剥がせないとのこと。斜めにてこで剥がすのだとか。
磁石は壊れたハードディスクから取り出したもの。
制御部は、二足歩行ロボットを紹介して頂いた
ベストテクノロジー社製のH8の基板です。
この基板にはモータ制御用のFETも実装されていて
これだけでロボットが出来てしまうそうです。
このFETがまたすごい能力です。ノーマル基板で
75Aも流せるものです。
スーパー基板だと225Aも流せる化け物です。
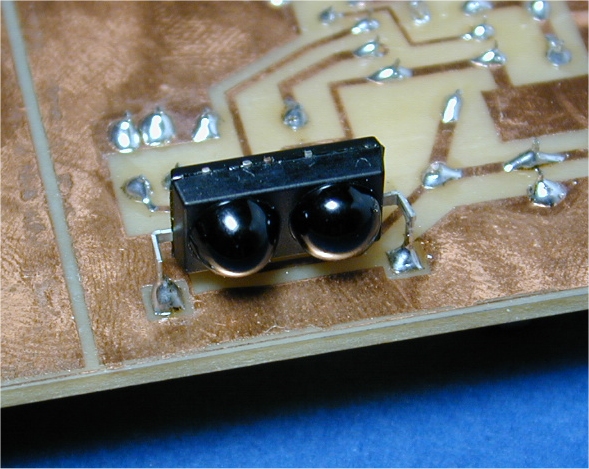
10.IrDA通信汎用IOユニット : 後閑
マイクロチップ社の新製品MCP2150というIrDA通信用のチップを使った赤外線通信
による汎用入出力ユニットを紹介しました。
このICにはIrCommというIrDAのプロトコルが実装されているため、パソコンやPDAに
実装されている赤外線通信と直接送受信が可能になります。
この試作とノートパソコン、それとWorkPadで動作確認をしました。
右側のICがMCP2150、左側はPIC16F628です。
MCP2150とPICのインターフェースは通常のUSARTの調歩
同期信号となるので、ソフトは簡単に作ることが出来ます。
発光ダイオードとPWM出力が出来るようになっています。
赤外線通信モジュールで、これは外付けで用意する必要が
あります。
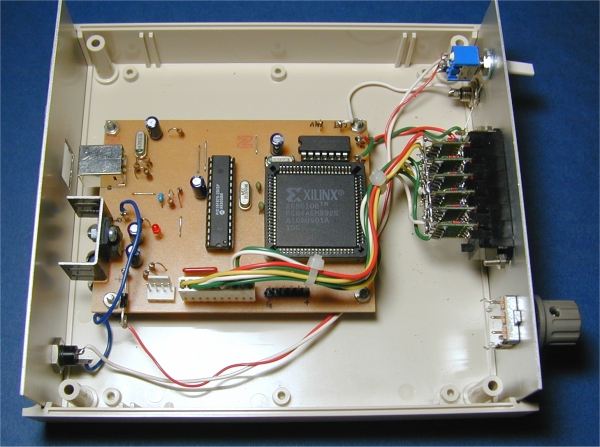
11.CPLD+PICパルスジェネレータ : 後閑
XilinxのXC95108とPIC16F876を使ったパルスジェネレータで、100nsecから1secまでの
連続パルスを出力することが出来ます。
またパルスのデューティを0から100%の間で設定することが可能です。
パルス生成をCPLDが行い、パソコンとの接続をUSB接続としこれをPICが担当します。
ケースのフロントパネルには6桁のディジスイッチが組み込んであり、これで手動設定で
パルス幅を指定することが出来ます。
シグナルジェネレータの外観。
前面パネルに6桁のディジスイッチを組み込みこれで手動の
パルス幅設定が可能。
内部実装、電源はACアダプタとしたのですっきりしている。
基板上に、PIC16F876とXC95108のCPLDが実装されているのみ。
出力はTTLのまま。
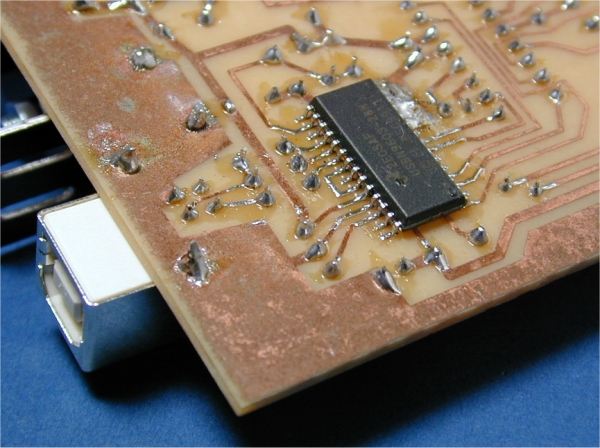
ケース背面から直接USBプラグを差し込んで基板上のソケットと
接続する。
基板の裏側にUSBコントローラUSBN9603が実装されている。
これだけでUSBのフルスピードでの接続が実現できる。