【第14回情報交換会概要】
開催日時 2002年 2月2日 PM1:00〜PM5:00
中本 好彦
開催場所 エポック中原 第3会議室
出席者
西村 正弘
大内山 士郎
田部 圭史郎
徳山 陽人
井村 裕
松家 光雄
高木 美薫
山原 忠雄
樋口 聡
菅沼 直志
小田島 雄一
小川 晃
矢野 百人
黒滝 賢治
牟礼 勝仁
日高 弘
神津 崇士
中尾 裕一
長浜 淳一
後閑 哲也
【まとめ】
第14回情報交換会は、年の初めでゆったりしていたのがやっと忙しくなった
ところのようで、仕事に追われている方が多く、残念ながら欠席という方が
大勢いらっしゃいました。開催日はこの辺を意識する必要があると思いました。
それでも、新人を含め大勢の方々に参加をいただきました。特に今回は
高校生から定年退職した方まで非常に幅広い年齢層の参加者でした。
(小学生?も一人いましたね)
《参加者写真》
小田島氏 長浜氏 山原氏 高木氏 松家氏 徳山氏 田部氏 矢野氏 菅沼氏 樋口氏(息子さん) 井村氏 大内山市 西村氏 中本氏 牟禮氏 黒滝氏 中尾氏 小川氏 日高氏 神津氏
スナップ
今回は場所を変えて広い部屋を借りましたので、ゆったりとくつろいで
話をすることができました。
でもMALさんの部屋で、皆が寄せ集まる感じも捨てがたいという意見も
多いのですが。
【作品紹介】
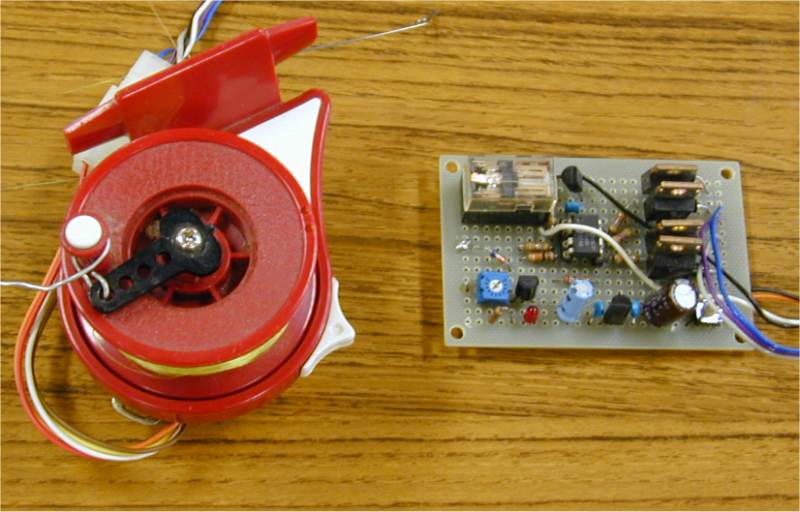
1.魚釣り あたり検知、自動あわせ器 :山原さん
なかなか発想豊かな作品で、魚釣りの時に、”あたり”を検知したら自動で
リールを巻き取って”合わせ”をする装置です。
原理は、リールの回転軸に取り付けたパルスモータを発電機として使い、
魚が引くと、パルスモータが回転し、そのとき瞬間的に発電しパルス信号
を出力します。そのパルスを増幅してPICで受け、割込み信号として使って
検知します。 信号を検知したら、リレーを駆動して、パルスモータの接続を
切替え電源に接続します。これによりパルスモータが回転し、糸を巻き取る
ことで合わせを行います。
特にはぜ釣りには効果を発揮するようで、実際に釣果が出たそうです。
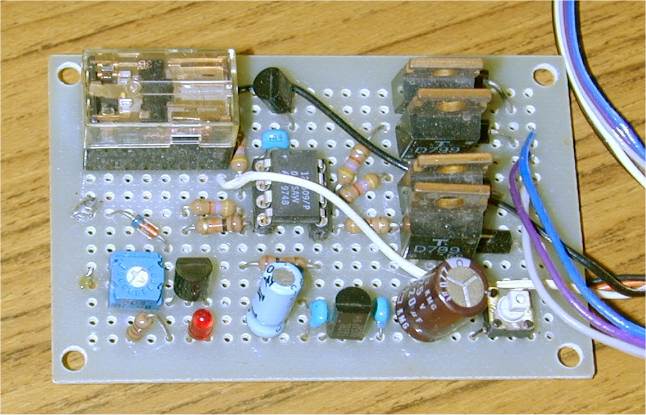
写真では裏側になって見えませんが
リールの軸にパルスモータが連動している。
左上端がパルスモータ電源切り替えようの
リレーです。モータドライブは大型のトランジスタ
でドライブ。
センサーのアンプはトランジスタ。
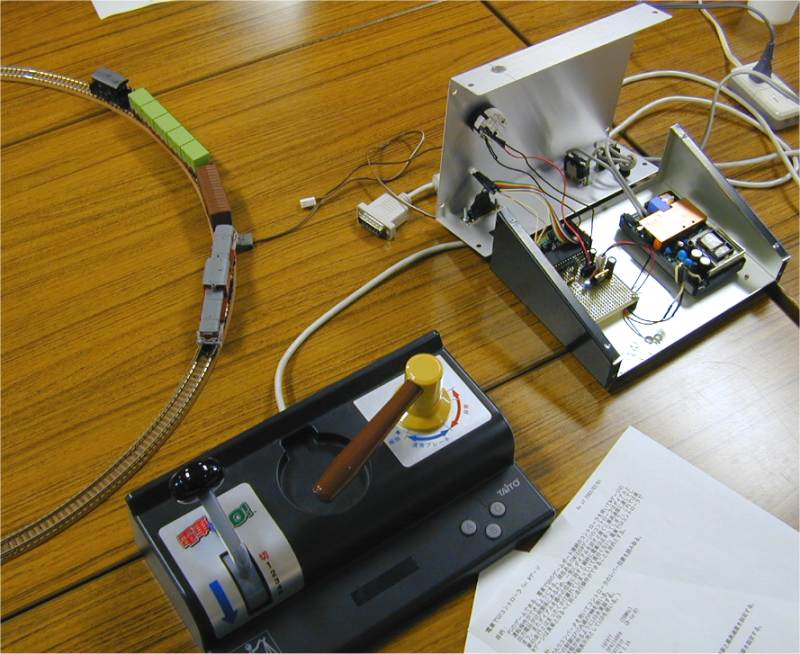
2.電車でGOコントローラ for Nゲージ : 樋口さん
電車模型は子供から大人まで趣味としている人が多いものです。
その電車を運転する列車コントローラは、そのままだとダイアルがON/OFF操作に近く、
実際の電車の動きとは違った感覚であるのを、PICを使ってモータの速度制御を
することで、ゆっくり発進しゆっくり停止する動作をさせて実際の動きに近いものに
する装置です。
左下が電車でGOのゲーム用列車コントローラ
右上が製作したコントローラ
この列車コントローラはダイアルに可変抵抗が
接続されていて、その可変抵抗値が出力となって
いる。これを電圧変化に直してPICに入力している。
右側は電源、左側が制御部
PIC16F877を使っています。
列車コントローラのダイアル信号の可変抵抗値を
電圧変化にしてPIC内蔵のA/D変換で入力する。
その値からパルス幅制御信号を可変して実際の列車用
の駆動出力を出力する。 出力はTA7291のHブリッジ。
結果的に列車の駆動電圧を可変していることになる。
3.4足歩行ロボット"Tetro" : 徳山さん
早稲田の学生さんの徳山さんの作品です。 ヒューマノイド研究所で研究をして
いるとのことで、その実験の応用で出来た作品のようです。
4足で歩いたり、蛙のように飛び跳ねたりする動作をして進みます。
パソコンとUSB接続で接続したリモコン方式でコントロールされていて、パソコン
側は、Linux上で動作する制御プログラムとなっています。
パソコンから、足の角度や動作の仕方、速度などが自由にコントロールできる
ようになっています。
4足で歩いたり蛙とびで進んだりなかなか
ユニークな動作をします。
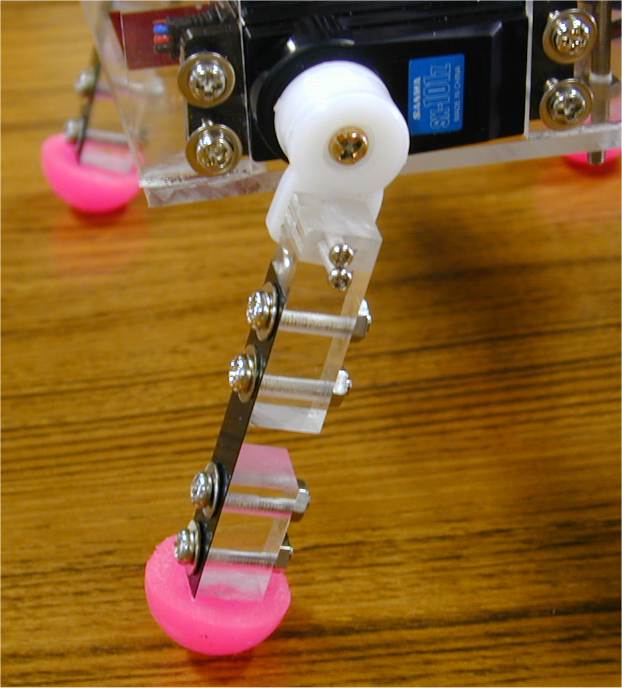
足回りはラジコンのサーボが4個使われて
います。このサーボで結構高速な動作を実現
しています。
ユニークな動作の仕掛けは、この足の作りにあり、
板ばねが使われています。
この板ばねの特性で、動きの柔らかさと
蛙飛びのような動きがうまく出来ているようです。
ちょっと写真が手ぶれで見にくくなってしまいました。
制御部はPIC16F876+USBN9603で出来ています。
「U-MC」という名前が付けられています。
出力はサーボへのシリアルパルス出力で4系統独立
にソフトで出力しています。
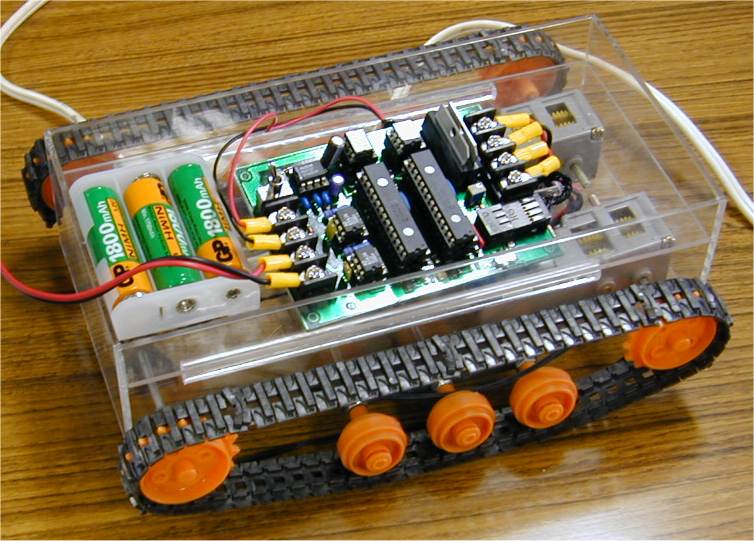
4.サバイバルロボット : 田部さん
同じく早稲田の学生さんの田部さんの作品です。サバイバルという名前の
ように、最適な環境を目標に学習制御しながら動きつづけます。
エネルギー源は太陽で、太陽電池を背負って走ります。
そして経験した環境を記憶しておき、サイクル毎に最適さを学習しながら
エネルギーの入出力が最も良くなる環境へ動いて行きます。
これまで1週間は動きつづけた実績があるとのこと。
背負っている太陽電池をはずした全景
バッテリの消費と充電をエネルギーの
入出力としています。
駆動部は田宮の教材シリーズでまとめて
いるので、誰にでも出来そうです。
制御部、左側から、バッテリの充放電エネルギーを
計測するためのA/D変換器、PIC16F876が2個
エネルギー換算と制御、学習制御の機能を分担
学習データ記憶用のフラッシュメモリ2個。これらは
I2C通信で接続。出力はHブリッジIC2個でモータを駆動。
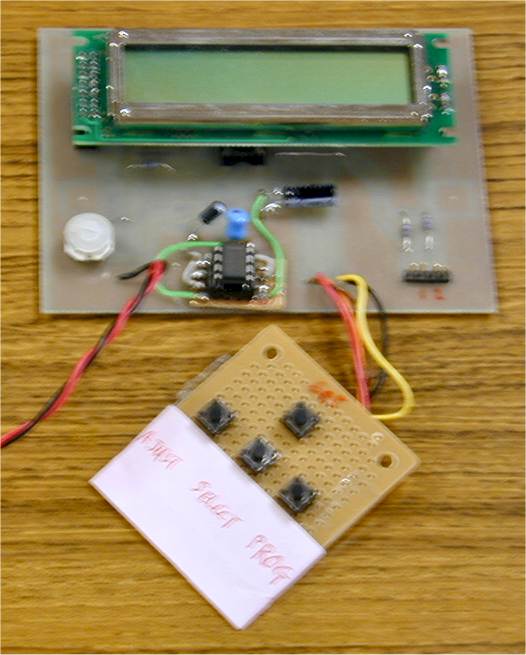
5.時計 : 西村さん
アナログ屋さんが始めて挑戦したプリント基板と
マイクロコンピュータ。
中味はタイマ時計。
消費電力を少なくする努力をしたが、結局クロック
が12.8MHzのため実現せず。
基板作成はWinBoard。
グランドのベタ部がきれいにエッチングできず苦労
したとのこと。
コツは、作成したパターン図をマジックインクでベタ部
だけ塗りつぶして補強すること。
(写真が手ぶれでピンぼけになってしまいました)
6.高信頼型汎用入出力ボード : 中本さん
半導体製造装置用に開発したという高信頼性の
汎用入出力ユニット。
高信頼にするため、入出力も電源も外部と絶縁
している。
入力はフォトカプラ、出力はリレーのドライ接点。
PICにはシーケンサのラダ-プログラムのインタプリタが
実装されていて、簡単にシーケンス回路を組み込める
ようになっている。
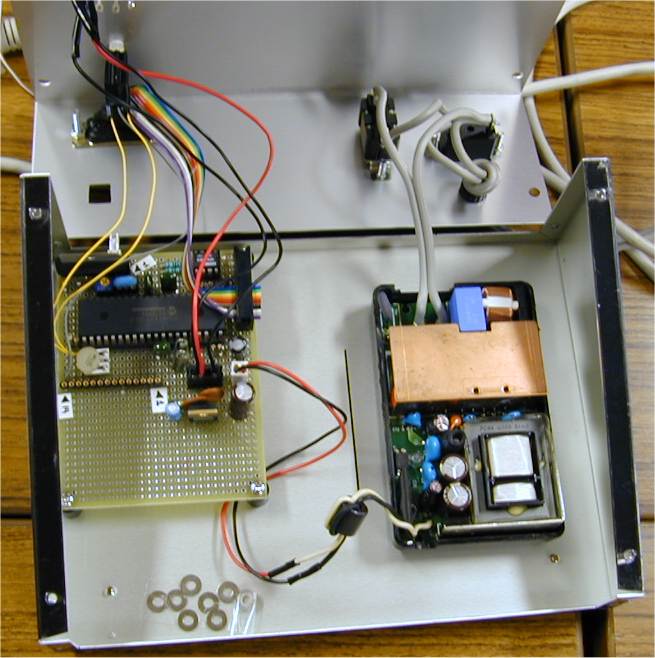
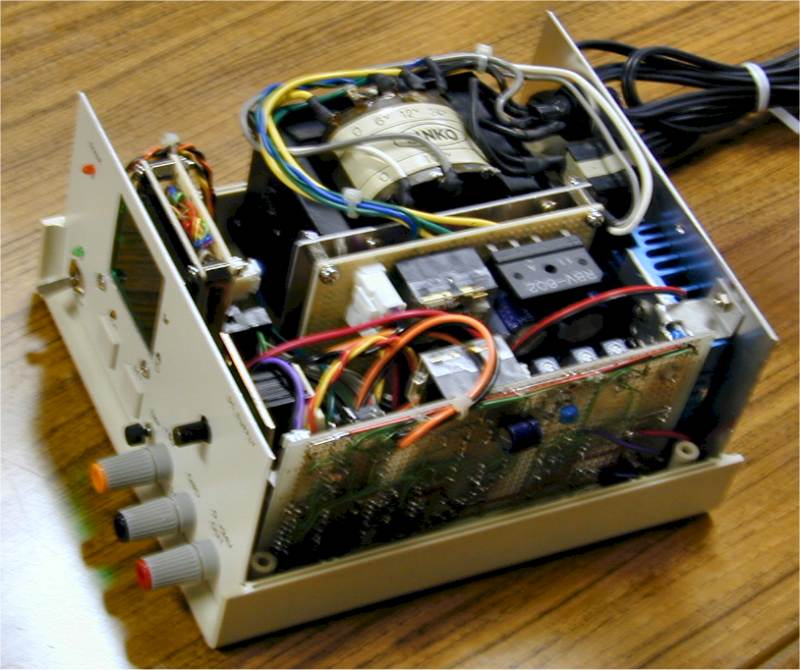
7.周波数特性測定装置とイーサネットボード : 矢野さん
重さ3kgというがっちりと作られた周波数特性測定装置。10Hzから10MHz程度の
範囲の入出力特性をパソコンと連動して自動計測できる。
ノイズを抑制し、自分自身の周波数特性を良くするためにいろいろ工夫し
この重さの作品となったとのこと。
外観はがっちりした金属ケースに納められている。
しかも、電源部と回路部は熱い銅版で仕切られている。
ここまでやるかという感じで出来ている。
上側が電源で、カットコアトランスに高級電解コンデンサ
と贅沢な構成。
中央銅色金属ケースには、DDSが実装されていてここで1Hz
単位の正弦波を出力し、その下にあるフィルタ回路で余計
なノイズを取り除いて出力される。フィルタは3種類手動切替え。
中央の白い金属ケースの中にPICが実装されている。
その左側は、ログアンプ回路で、ノイズ低減と周波数特性を良くするために多くの工夫が
なされています。
パソコンとの接続にはRS232Cが使われていますが、この
汎用のイーサネット-RS232C変換基板を使うと、簡単に
LAN接続が可能になるとのこと。
しかもパソコン側のプログラミングはCOMポートとして
扱えるようにするデバイスドライバが標準で用意されて
いるとのこと。
8.高機能実習用電源装置 : 小川さん
MALの小川さんが、学生の教材用にと作った電源装置とのこと。
中味は一杯詰まっていて、PICは結構複雑な機能を実行しています。
PICの機能
・ロータリーエンコーダによる出力電圧の設定
・電圧のA/D変換によるフィードバックと出力制御
・電圧と内部温度のLED表示制御(ダイナミック制御)
・温度によるファンのPWM制御
出力は最大24V 1A
内部実装は目一杯で、かなり実装に苦労したとのこと。
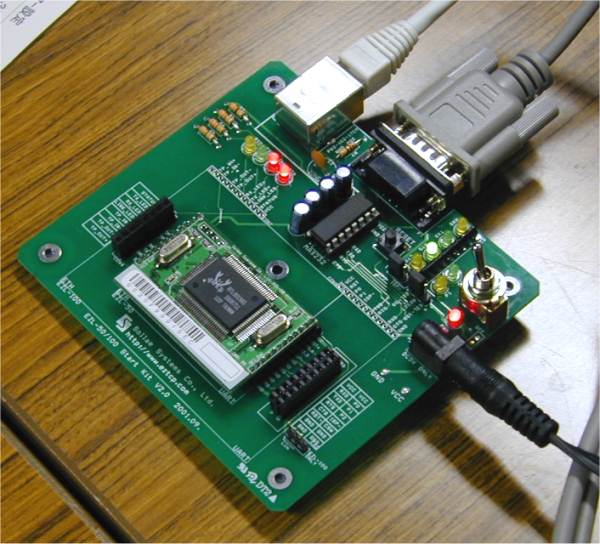
9.USB接続周波数カウンタ : 後閑
USBインターフェースを備えた8桁の周波数カウンタです。
USBでパソコンと接続し計測データをパソコンで収集できます。
カウントは最大80MHzです。
カウント部分はCPLDで、表示とUSB制御をPIC16F876で実行
USBはUSBN9603を使って制御
PICのプログラムにはPICROSを使用。
詳細は PIC活用製作例の頁へ
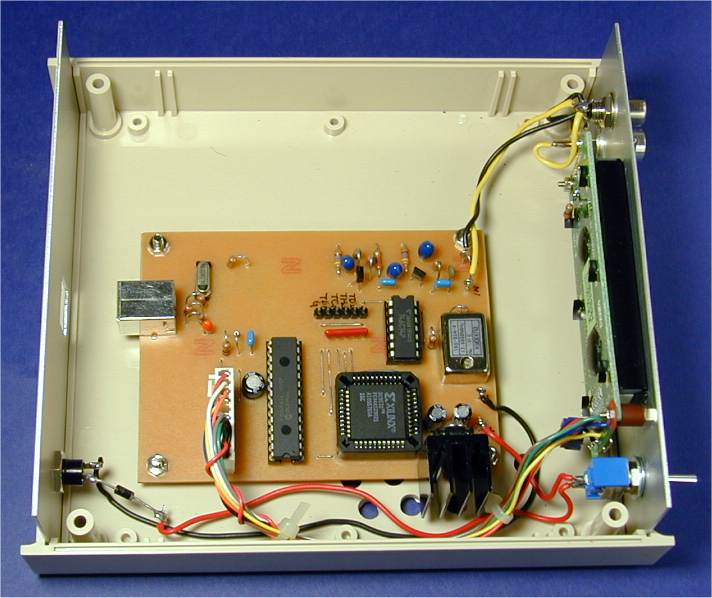
10.USB接続ディジタルマルチメータ : 後閑
USBインターフェースを備えた4.5桁のディジタルマルチメータです。
直流の電圧と電流を計測できます。
電圧 2.0000V 20.000V 200.00V 電流 2.0000A
校正用 10.000V 1.0000V 内蔵
下側がアナログ部でA/D変換には TC7135というマイクロチップ社の
二重積分型の4-1/2桁のものを使いました。
PICはA/D変換の制御と、表示制御とUSB制御を実行しています。
詳細は、PIC活用製作例の頁へ