【第30回情報交換会概要】
開催日時 2007年 11月 4日 PM1:00〜PM5:30
開催場所 高津市民館 11階 視聴覚室
【まとめ】
初めての会場でしたが、視聴覚室ということでプロジェクタなども備え付けられていて
快適な部屋でした。今回も大勢の方々に参加をいただきありがとうございました。
今回は皆さんからの発表作品が少なめであったため、日ごろの皆さんの疑問に
お答えするというQ&A形式でいろいろなことを議論しました。
PIC24FやdsPICの16ビットのPICマイコンを実際にお仕事で使われている方々からの
貴重な情報も聞くことができましたし、PICを始めたばかりの方々のなるほどという疑問
も聞くことができました。
《参加者写真》
【作品紹介】
1.温室の自動散水コントローラ : 川村さん
近所の農家からの依頼で製作したもので、
温室の散水をスケジュールに従って自動的に実行します。
PIC24Fを2個使ってスケージュールと表示、キーボードの
制御を行い、スケジュールに従って電磁バルブを制御して
散水します。
表示には明るい温室内でも見えるように蛍光表示型のものを
使っています。
電磁バルブの制御はノイズを考慮して半導体スイッチを使って
います。時計にはバッテリバックアップのできる専用の時計用ICを使っています。
PIC24Fを初めて採用し、データシートと実際の動作が異なる部分があって苦労されたようです。
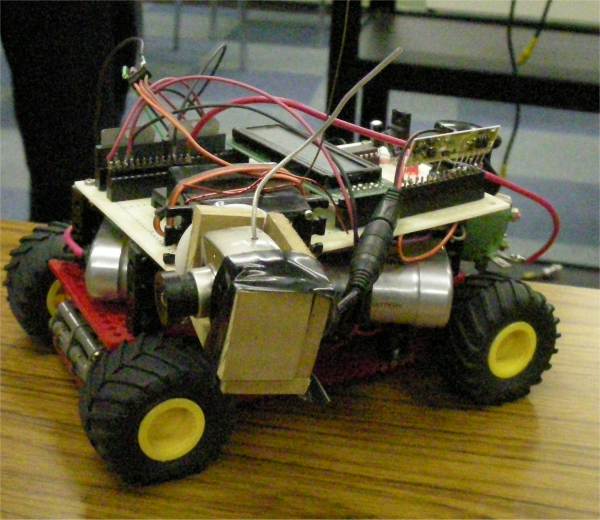
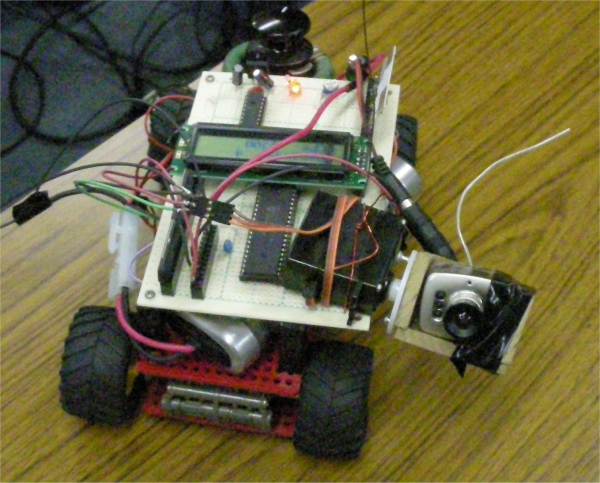
2.カメラ付きラジコン車 : 近藤さん
カメラを搭載した無線によるラジコン車
手前がカメラで本体から無線でデータを送信する。
四輪駆動方式でPIC16F73を使って全体を制御している。
無線モジュールを使って送受信しているが、データ通信の
誤りチェックがないため、ときどき誤動作をするとのこと。
動作状態を液晶表示器でモニタできる。
ドライバには良く使われているブリッジ用のICモジュールを
使っているが、やや発熱が多い。
カメラモジュールも向きをリモコンできる。
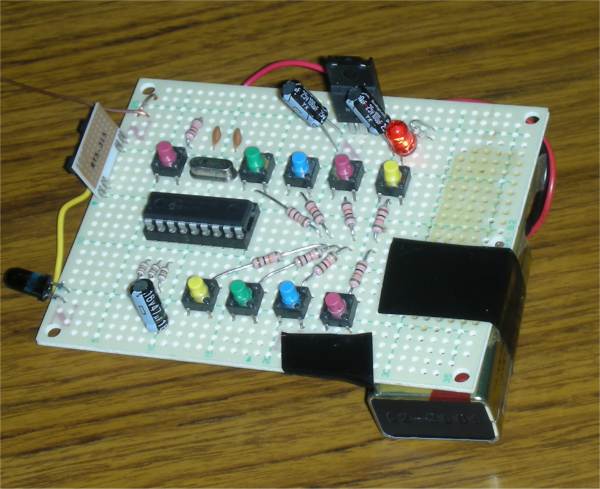
送信ユニット
PIC16F84で制御している。左端にあるのが無線の送信モジュール
スイッチによる制御で、速度などはパルス幅で制御しているが、
この方式は無線通信ではちょっと誤動作で厳しい。
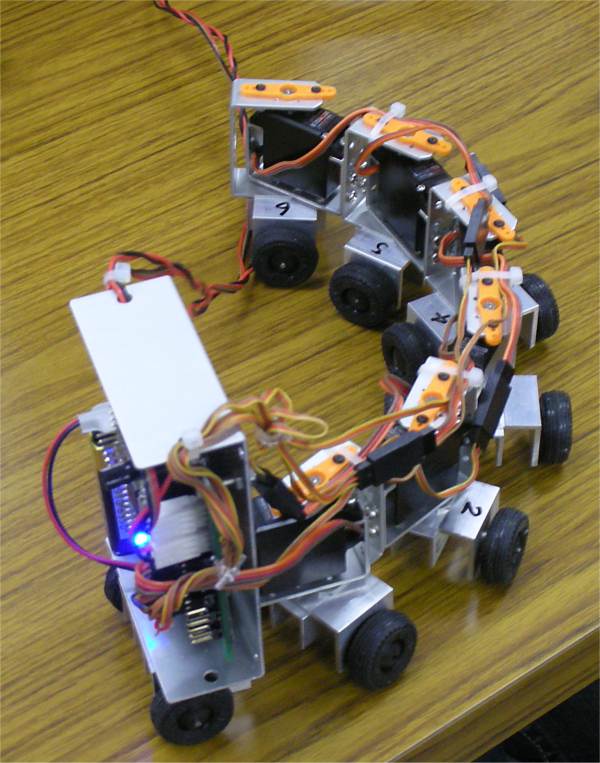
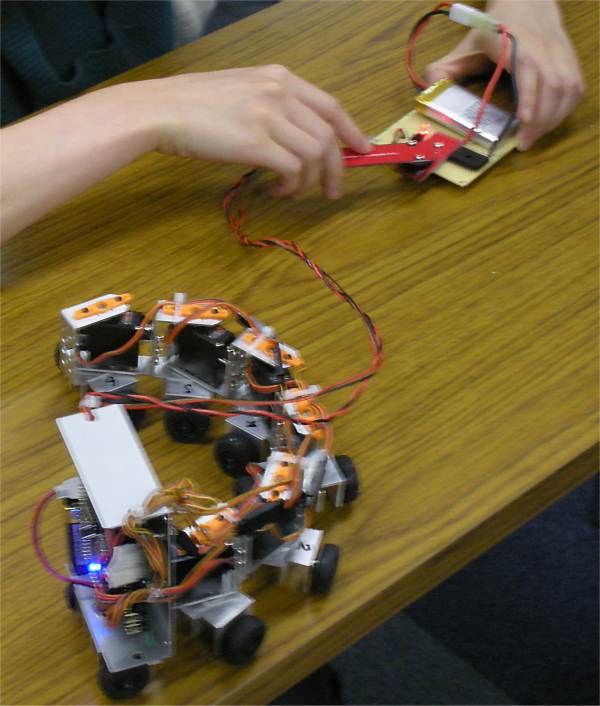
3.RCサーボを組み合わせた蛇型ロボット : 箱木さん
非常にユニークな蛇型ロボットです。
各節に相当する部分にRCサーボとコの字型金具を組み合わせて
それで下部の車輪の向きを動かしています。
頭に相当する部分にマイコン基板をセットし、ここから全ての
RCサーボを制御しています。
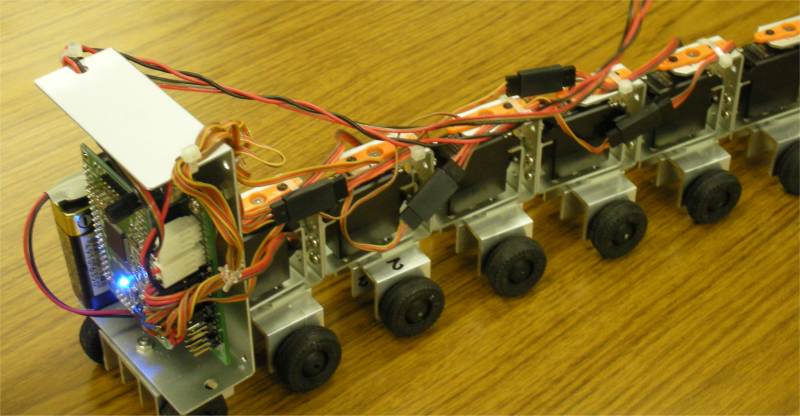
制御は、7個のRCサーボに前から順番に遅延させて動作させる
ことで、うねりが後ろ側に伝わるようにしています。
これで前への推進力が生まれます。
操作は紐式のリモコンになっていて、ツマミを左右に動かすと
その動きがそのまま蛇のうねりになって伝わります。
これでツマミを左右に連続的に動かすと、蛇のうねりが
連続的に行われて前進します。
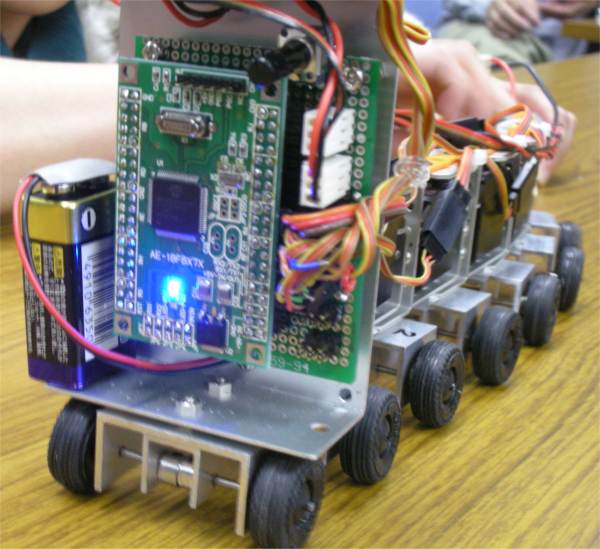
制御用のマイコンの部分です。
1個のPICで7個のRCサーボを制御しています。
RAMの中に動作させる回転角度を記憶し、それを
順番に後ろ側のRCサーボに伝えて制御します。
全体の構造です。
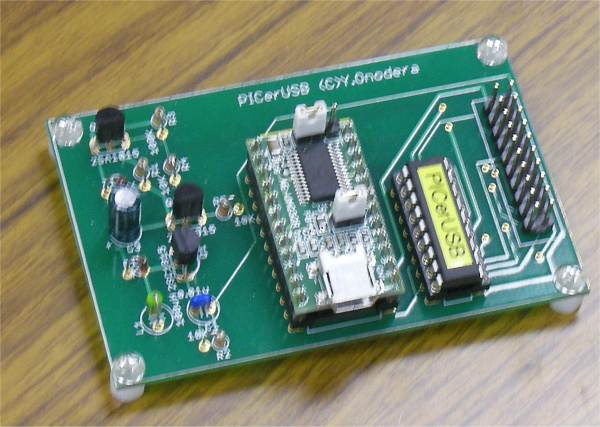
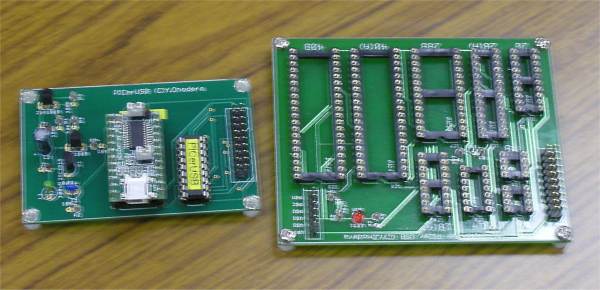
4.USB接続の新型PICライタ : 小野寺さん
dsPICの書き込みもできるUSB接続のPICライタです。
こちらが本体でICSP接続となっています。
まだ製作途中とのこと。
ICSPにオプションのソケットボードを接続してDIPタイプの
書き込みができます。
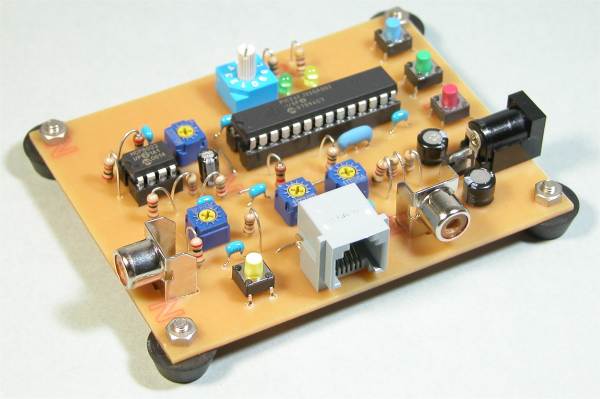
5.NTSCビデオ出力のオシロスコープ : 後閑
NTSCのモノクロビデオ信号を直接PICから出力するオシロ
スコープで、28ピンのPIC24Fを使っています。
ビデオインターフェースは抵抗3個だけでできています。
ビデオをスキャンは、同期はタイマの割り込みで、ビデオ信号は
SPIのシリアル出力で行っているので、プログラムの実行時間
には余裕があります。
その間で、5usec周期でA/Dコンバータを動かしてアナログ入力を
サンプリングしてオシロスコープの機能を実行しています。
こちらの表示例は、3次元のグラフをPIC24内部で計算し
グラフプロットしたもので、ビデオスキャンを連続的に実行しながら
グラフの計算も並行して実行しています。
この図形を描くのに約0.2秒しかかかりません。
16ビットPICマイコンの高速演算機能が役に立ちます。
こちらがオシロスコープの画面例で、2kHzの正弦波を
入力して表示した例です。