亂僨乕僞廂廤儃乕僪偺奣梫亃
儚僀傾儗僗僆僔儘僗僐乕僾偺僔僗僥儉峔惉偵婎偯偄偰丄僨乕僞廂廤儃乕僪偺
僴乕僪僂僃傾傪惢嶌偟傑偟偨丅
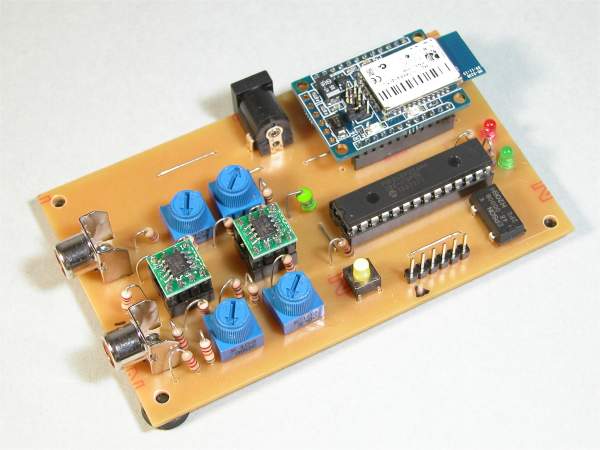
姰惉偟偨僨乕僞廂廤儃乕僪偺奜娤偼壓恾偺傛偆偵側傝傑偡丅
儃乕僪偺塃懁偵PIC儅僀僐儞偑偁傝傑偡偑丄崅懍A/D曄姺傪崅懍張棟偱偒傞傛偆偵丄
PIC24EP256MC202偲偄偆60MIPS偱摦嶌偡傞嵟怴偺16價僢僩PIC儅僀僐儞傪
巊偭偰偄傑偡丅
偙偺僨乕僞廂廤儃乕僪偼僞僽儗僢僩偑Nexus 7(2012)偱傕Nexus 7(2013)偱傕嫟捠偱
巊偆偙偲偑偱偒傑偡丅
塃忋偵僜働僢僩幚憰偝傟偰偄傞偺偑丄Bluetooth儌僕儏乕儖偺RN-42SM偲側傝傑偡丅
嵍懁偑怣崋擖椡晹偺2僠儍僱儖偺傾儞僾偱丄偦傟偧傟僎僀儞偲僆僼僙僢僩偺挷惍偑
僣儅儈晅偒壜曄掞峈偱偱偒傞傛偆偵偟偰偄傑偡丅
傑偨僆儁傾儞僾偼丄偄傠偄傠側僆儁傾儞僾偑帋偣傞傛偆偵SOIC僷僢働乕僕傪
曄姺婎斅偵慻傒棫偰偰IC僜働僢僩偱幚憰偟傑偟偨丅
惢嶌偡傞僨乕僞廂廤儃乕僪偺慡懱峔惉傪壓恾偺傛偆偵偡傞偙偲偵偟傑偟偨丅
慡懱偺惂屼偵偼16價僢僩PIC儅僀僐儞偺PIC24EP256MC202傪巊偄傑偡丅
僾儘僌儔儉僒僀僘偼彫偝偄偺偱丄PIC24EP32MC202偱傕戝忎晇偱偡丅
僋儘僢僋偵偼帪娫惛搙傪傛偔偡傞栚揑偱丄48MHz偺僋儕僗僞儖敪怳婍傪巊偄傑偟偨丅
偙傟偐傜撪憼PLL偱120MHz傪惗惉偟丄僼儖僗僺乕僪偺60MIPS摦嶌偲偟傑偡丅
偙偙偼捠忢偺僋儕僗僞儖敪怳巕傪巊偭偨峔惉偱傕栤戣偁傝傑偣傫偑PLL偺
掽攞棪傪曄峏偡傞昁梫偑偁傝傑偡丅
僆儁傾儞僾偵偼儅僀僋儘僠僢僾幮偺惢昳偱揹尮揹埑偑亇6V傑偱壜擻偱
GBWP偑10MHz偺MCP6H92傪巊偄傑偟偨丅
偙偺僆儁傾儞僾偱DC偐傜擖椡壜擻偲偡傞偨傔弶抜傪椉揹尮偲偟嵎摦傾儞僾峔惉偲
偟傑偟偨丅
偝傜偵丄僎僀儞偲僆僼僙僢僩傪偱偒傞偩偗撈棫偵挷惍偱偒傞傛偆偵2抜峔惉偺
傾儞僾偲偟傑偟偨丅
Bluetooth儌僕儏乕儖偵偼丄奐敪僣乕儖偺RN-42SM傪巊偄傑偟偨偑丄
偙偙偼RN42XVP偱傕慡偔栤戣偁傝傑偣傫丅
揹尮偼5V擖椡偲偟丄儗僊儏儗乕僞偱3.3V傪惗惉偟偰嫙媼偟偰偄傑偡丅
弶抜偺僆儁傾儞僾偵亅3.3V傪嫙媼偡傞偨傔DC/DC僐儞僶乕僞傪巊偭偰偄傑偡丅丂
崁栚 婡擻丒巇條 旛峫 揹尮 DC5V傪AC傾僟僾僞傑偨偼僶僢僥儕偐傜嫙媼偡傞丅撪晹偼儗僊儏儗乕僞偱3.3V偲偟偰嫙媼丅僆儁傾儞僾偼亇3.3V偱嬱摦
丂乮DC/DC僐儞僶乕僞偱亅3.3V傪惗惉乯僶僢僥儕偼僗儅儂廩揹梡傪棳梡 儅僀僐儞 PIC24EP256MC202丂28僺儞
丂僋儘僢僋丗奜晹悈徎敪怳婍丂48MHz擖椡 2僠儍僱儖丂RCA僕儍僢僋偱愙懕
丂廃攇悢斖埻丂丗DC乣栺100kHz
丂擖椡揹埑丂丗丂亇50mV乣栺0.3V
丂僆僼僙僢僩丗丂亇1.5V
巊梡僆儁傾儞僾丂丗MCP6H92
揹尮丗亇3.3V偱嬱摦壜曄掞峈偱壜曄
壜曄掞峈偱壜曄A/D曄姺 PIC撪憼偺A/D僐儞僶乕僞傪巊梡
丂僒儞僾儕儞僌廃攇悢丗嵟崅1Msps
丂暘夝擻丂丗10價僢僩柍慄晹 RN-42-SM丂Bluetooth儌僕儏乕儖
UART捠怣懍搙丗115.2kbps
亂夞楬偲慻傒棫偰亃
慡懱峔惉傪傕偲偵嶌惉偟偨夞楬恾偑壓恾偲側傝傑偡丅
揹尮偼DC5V擖椡偲偟丄AC傾僟僾僞偐僶僢僥儕傪巊偆傕偺偲偟傑偡丅
偙傟偐傜儗僊儏儗乕僞偱3.3V傪惗惉偟慡懱偵嫙媼偟傑偡丅
偝傜偵弶抜偺僆儁傾儞僾傪椉揹尮偱摦嶌偝偣傞偨傔丄儅僀僋儘僠僢僾幮偺
TC7662B偲偄偆僠儍乕僕億儞僾曽幃偺DC/DC僐儞僶乕僞偱亅3.3V傪惗惉
偟偰嫙媼偟傑偡丅
偙傟偱僆儁傾儞僾偼亇3.3V偱摦嶌偱偒傞傛偆偵側傝傑偡偐傜丄僆儁傾儞僾弶抜傪
嵎摦擖椡夞楬偲偡傟偽丄DC怣崋傕寁應懳徾偲偟偰埖偊傞傛偆偵偱偒傑偡丅
偝傜偵偙偺僆儁傾儞僾偺弌椡傪壜曄掞峈偱挷惍偟偰僎僀儞傪壜曄偲偟偰偄傑偡丅
師抜偺僆儁傾儞僾偱僆僼僙僢僩偑挷惍偱偒傞傛偆偵偟傑偡丅
偙傟偱丄僆僔儘僗僐乕僾偲偟偰摦嶌偝偣偨偲偒偺悅捈曽岦偺挷惍偑偱偒傑偡丅
弶抜傾儞僾偺弌椡偼嵟戝亇3V掱搙傑偱偼榗側偔弌椡偝傟傑偡偺偱丄弶抜偺
僎僀儞偑栺10攞偱偡偐傜丄寢壥揑偵嵟戝擖椡偼栺亇0.3V傑偱偲偄偆偙偲偵側傝傑偡丅
偙傟埲忋偺怳暆偺怣崋偑擖椡偝傟傞偲怣崋偺忋壓偑僋儕僢僾偝傟偰偟傑偄傑偡丅
PIC儅僀僐儞廃傝偵偼僋儘僢僋梡偺敪怳婍偲LED偑2屄丄Bluetooth儌僕儏乕儖丄
ICSP偩偗偲側偭偰偄傑偡偺偱丄28僺儞偺偐側傝偑梋偭偨忬懺偱偡丅
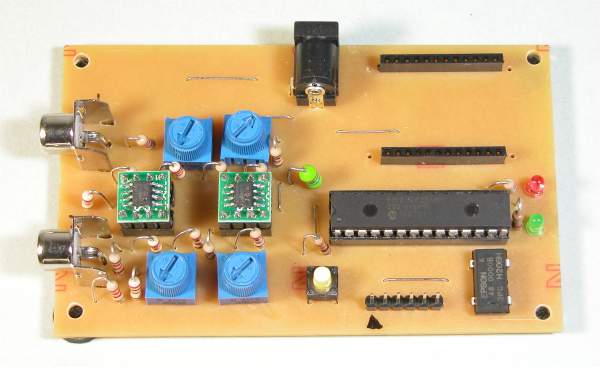
慻傒棫偰偑姰椆偟偨僨乕僞廂廤儃乕僪偺晹昳柺偲偼傫偩柺偑壓婰偲側傝傑偡丅
亂僾儘僌儔儉偺慡懱峔惉亃
僨乕僞廂廤儃乕僪偺僼傽乕儉僂僃傾偼娙扨側峔惉偲側偭偰偄偰丄1偮偺僼傽僀儖
偩偗偱峔惉偟偰偄傑偡丅
僼傽乕儉僂僃傾偺峔惉傪僼儘乕恾偱帵偡偲壓恾偺傛偆偵側傝傑偡丅
儊僀儞偺棳傟偱偼丄弶婜壔偟偨偁偲儊僀儞儖乕僾偱忢帪UART偐傜偺僐儅儞僪庴怣偑
偁傞偐偳偆偐傪僠僃僢僋偟偰偄偰丄庴怣偑偁傟偽撪梕傪妋擣偟偰丄寁應奐巒僐儅儞僪
偱偁傟偽丄僞僀儅3傪僗僞乕僩偝偣偰僒儞僾儕儞僌傪奐巒偟傑偡丅
偦偟偰2000夞偺僒儞僾儕儞僌偑廔椆偡傞傑偱偦偺傑傑懸偪傑偡丅
偦偺娫偵A/D僐儞僶乕僞偺妱傝崬傒偱僒儞僾儕儞僌偑峴傢傟丄2000夞偱廔椆偲側傝傑偡丅
偙傟偱儊僀儞儖乕僾偑愭偵恑傒丄僨乕僞傪憲怣僶僢僼傽偵僙僢僩偟偰偐傜堦妵偱憲怣傪
幚峴偟傑偡丅憲怣偑姰椆偟偨傜嵞搙僐儅儞僪庴怣懸偪偱懸偪傑偡丅
偙偙偱丄寁應偺巇曽丄偮傑傝僒儞僾儕儞僌偺棳傟傪愢柧偟傑偡丅
偙偺棳傟傪恾偱帵偡偲壓恾偺傛偆偵側傝傑偡丅
傑偢僒儞僾儕儞僌偼僞僀儅3偺廃婜偱帺摦揑偵A/D僐儞僶乕僞傪僩儕僈偡傞偙偲偱峴傢傟傑偡丅
偙偺僞僀儅3偺廃婜偑嵟抁1兪sec偲側偭偰偄傑偡偺偱丄1Msps偲偄偆僒儞僾儕儞僌惈擻偵側傝傑偡丅
傑偨偙偺PIC儅僀僐儞偺A/D僐儞僶乕僞偺惈擻偼1.1Msps偲側偭偰偄傑偡偺偱丄
1Msps偱傕摦嶌偑壜擻偱偡丅
A/D僐儞僶乕僞偵偼16屄偺僶僢僼傽偑偁傝丄偙傟傪2偮偺8屄暘偺僶僢僼傽偵暘偗偰岎屳偵
巊偆傛偆偵偟傑偡丅偝傜偵8夞偺A/D曄姺偛偲偵妱傝崬傒傪敪惗偡傞傛偆偵愝掕偟偰偍偒傑偡丅
偙傟偱丄曅懁偺A/D曄姺僶僢僼傽偑堦攖偵側偭偨傜妱傝崬傒偑敪惗偡傞偙偲偵側傝傑偡丅
偙偺妱傝崬傒張棟偱A/D曄姺僶僢僼傽偺撪梕傪2000屄暘偺儊儌儕僶僢僼傽偵僐僺乕偟傑偡丅
偙偺儊儌儕僐僺乕張棟偺娫偵傕僞僀儅3偼摦嶌宲懕偟偰偄傑偡偐傜丄A/D曄姺偺娫偑
偁偐側偄傛偆偵丄傕偆堦曽偺8屄偺A/D曄姺僶僢僼傽傪巊偭偰曄姺寢壥傪曐懚偟傑偡丅
崱搙偼偙偪傜懁偺曄姺僶僢僼傽偑堦攖偵側傞偲師偺妱傝崬傒偑敪惗偟傑偡偐傜丄
偙偺僶僢僼傽偐傜儊儌儕僶僢僼傽偵僐僺乕偟傑偡丅
偙偺儊儌儕僐僺乕傪幚峴偡傞妱傝崬傒張棟偺幚峴帪娫偑丄8夞偺僒儞僾儕儞僌帪娫丄
偮傑傝8兪sec傛傝抁帪娫偱廔傢傟偽丄1兪sec廃婜偺僒儞僾儕儞僌偑搑愗傟側偔幚峴
偱偒傞偙偲偵側傝傑偡丅
偙偺偲偒60MIPS偲偄偆PIC儅僀僐儞偺崅懍惈擻偑妶偐偝傟傑偡丅
幚嵺偵廫暘偺梋桾傪傕偭偰張棟偑姰椆偱偒偰偄傑偡丅
亂僟僂儞儘乕僪亃
儚僀傾儗僗僆僔儘梡偺僨乕僞廂廤儃乕僪偺僼傽乕儉僂僃傾偼壓婰偐傜僟僂儞儘乕僪
偱偒傑偡丅MPLAB X IDE偺僾儘僕僃僋僩僼傽僀儖1幃偲側偭偰偄傑偡丅
丂丂仛仛仛丂僨乕僞廂廤儃乕僪偺僼傽乕儉僂僃傾丂僟僂儞儘乕僪丂仛仛仛
丂丂丂栚師儁乕僕傊
丂