【概要】
PIC18F2320と無線受信モジュールを使って、前ページのラジコン送信機と組み
合わせて使うラジコン車を作ってみました。
この加速度センサを使った送信機でも、結構スムーズに操縦できるので、いろいろな
応用が考えられます。
加速度センサのラジコン送信機と
円盤型ラジコン車
【外観】
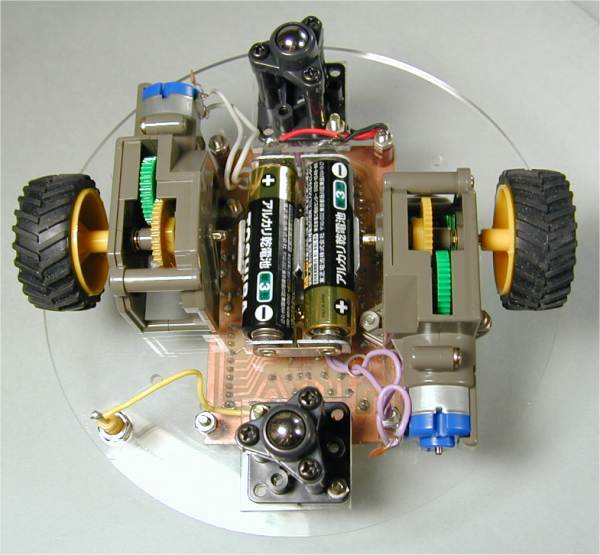
円盤型ラジコン車の外観は、下記の写真のようになっています。
市販のアクリル円板と、アクリル半球を組み合わせただけです。
アクリル円板にアクリル半球を
組み合わせたラジコン車
駆動部は下記写真のように、すべて下側に実装されています。タミヤの工作キット
で作成していますので、アクリル円板に穴あけさえすれば、工作は簡単にできます。
4速クランクギヤボックス2個
ボールキャスタ2個で駆動部ができています。
モータ用の電源は単三電池2個で、中央に配置
しています。
タイヤ軸がちょうど円板の直径に沿って配置されて
います。
【構成】
このラジコン車の内部構成は、下図のようになっています。
大きく駆動部と受信ユニット部で構成されています。まず、駆動部には、市販の4速クランクギヤボックスというモータ
ギヤユニットを2個使い、アクリル円盤上の直径の線上にタイヤの回転軸が
来るようにしています。これで、旋回がスムーズにできます。
車体の前後を支えるため、市販の組み立て型ボールキャスタを2個使って
います。このボールキャスタは、組み立て方により高さが4種類に変えられる
ため、便利に使うことができますが、今回組み合わせたタイヤでは3mmほど
高さが不足したので、アクリル板をスペーサとして使って高さ調整をしています。
駆動モータの制御は受信ユニット内のPICで行いますが、出力段はMOSFET
トランジスタアレイを使ったフルブリッジ構成となるようにして、PICの
CCPモジュールによるPWM制御を行っています。
無線通信の受信モジュールはPICの内蔵USARTに接続して、2400bpsの速度で
通信を行います。受信したデータに含まれている速度データをそのままモータの
PWM制御のデューティ値として使っています。旋回制御などの制御は送信機側で
実行することにしましたので、車両側はいわれたとおりの速度にモータ速度を
設定するだけとなっています。
電源はモータ用と受信ユニット用に別々のバッテリとして、構成を簡単化して
います。
【受信ユニット部】
ラジコン車に搭載する受信ユニットの回路は、下図のようになります。モータと
電池部を除いた部分が受信ユニット部で、プリント基板に実装されます。
この受信ユニットは、PIC18F2320を中心に構成し、無線受信モジュールで受けた
データをPIC内蔵のシリアル通信機能の「USART」で受信することとします。
そしてモータの制御は、CCPモジュールを使ったPWM制御で行います。
その他にデータ受信確認と通信エラー表示用に発光ダイオードをPICの基板に
直接接続しています。センススイッチがPICに接続されていますが、今回は使って
いません。
モータ制御には、2チャネルあるPIC内蔵CCPモジュールをパルス幅制御(PWM)
モードとして、2個のモータをそれぞれ独立に可変速、正転/逆転の制御ができる
ようにしています。
そしてモータのドライブはMOSFETアレイICによるHブリッジで構成してモータ
の制御を効率良くできるようにします。さらにこのHブリッジには、正転/逆転切替
のためNANDのディジタルICを1個使用しています。
これでモータの正転と逆転を瞬時に切り替えることができますし、電源をショート
してしまう問題も無くすことができます。
モータ用の電源は独立にして、外部から供給することとしています。NANDゲート
の出力でP型MOS FETの制御をしていますので、NANDゲートの出力は5V以上には
出来ませんから、結局モータ用の電源としては、5V以上には出来ません。
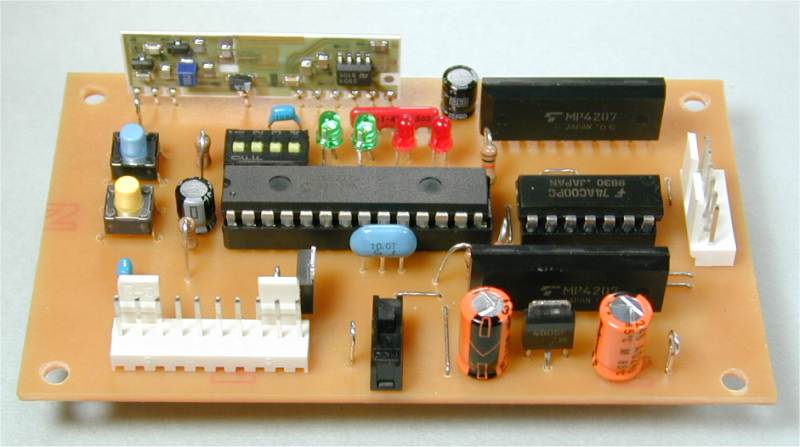
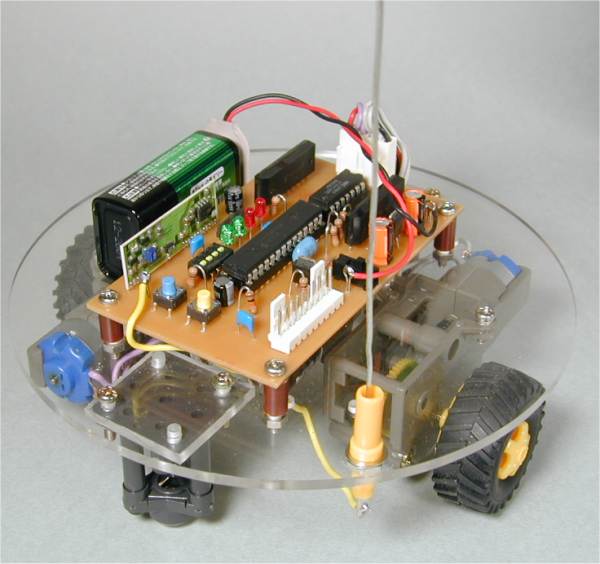
受信ユニットの組み立て後の外観は下記写真のようになります。
PIC18F2320を中心にして、上側にあるのが無線受信
モジュール、右側が、74AC00とMOSTFETアレイ
左下のコネクタは汎用の入出力ができますが、
今回は未使用です。ライトの点滅などに利用できます。
これをスペーサで浮かして、アクリル円板に取付けます。取付けの状態が
下記写真のようになります。
ベークのスペーサで浮かしてアクリル円板に
ねじ止めしています。
9Vの電池は、両面接着テープでアクリル円板
に固定しています。
アンテナは持ち運びの時に取り外せるよう
ピンプラグで取付けています。
受信ユニットのIVEX社用回路図、パターン図のデータは下記でダウンロードできます
ので、お使い下さい。
★受信ユニット回路図、パターン図(roboco71.lzh)
【プログラム】
受信ユニットのPICのプログラムです。 今回の方法では、モータの速度を
可変するデューティ値が直接送信機から送られて来るようにしましたので、
受信ユニット側のプログラムは簡単になっています。
全体の流れは下図のフローのように簡単になっています。基本的には、
受信したデータで動作しますが、受信したデータの反転2連送照合を行って
正しいときだけ動作させるようにします。
この受信ユニットのプログラムは下記でダウンロードできますのでお使い下さい。
★ 円板型ロボット 受信ユニットプログラム(remocon2rx.asm)