ライントレーサ
ライントレーサ ライントレーサ
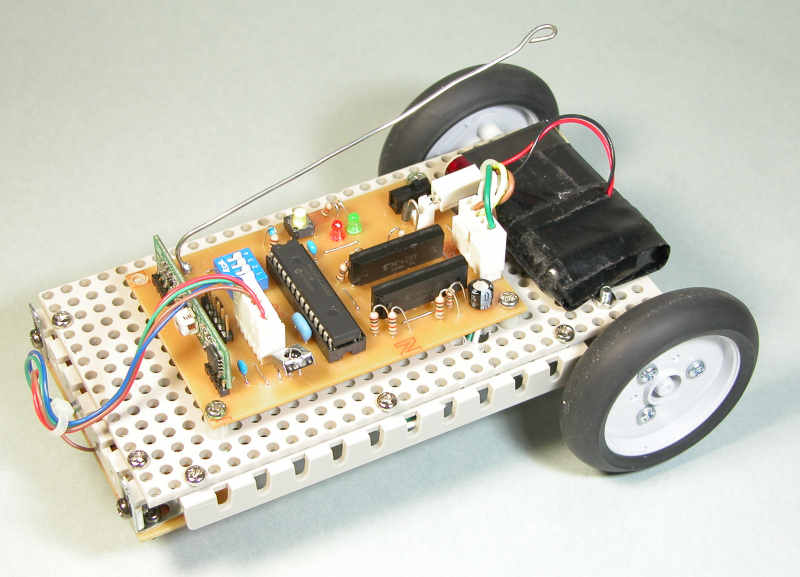
【概要】
多用途ラジコン車と同じ駆動部とコントローラを使い、これにラインセンサ部
を追加してソフトウェアを変更してライントレーサを作りました。
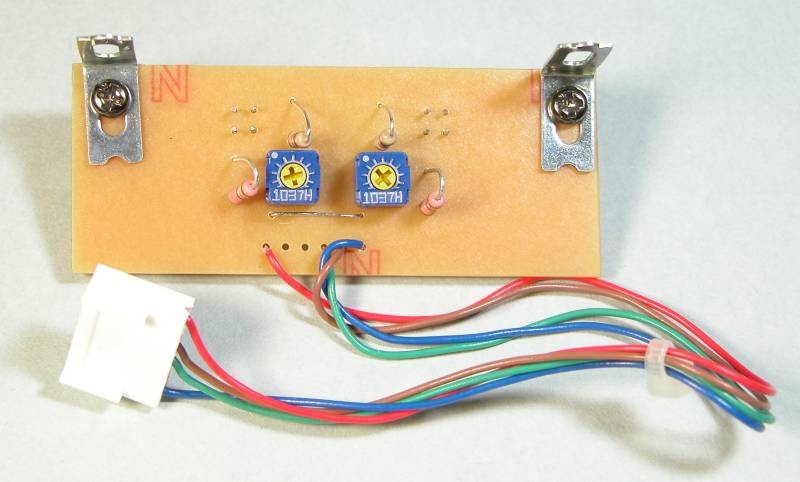
先端下部にラインセンサ基板
が固定されています。
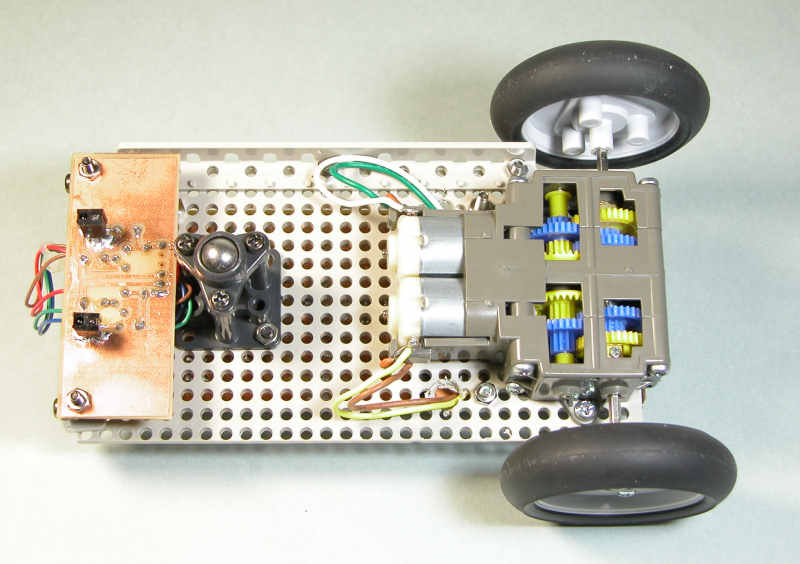
左端にあるのがラインセンサ基板
です。センサと床との間は0.6cmから
1cm程度の間隔が最適です。
【全体構成】
コントローラ部の全体構成は多用途ラジコン車と同じで下図のようになっていますが
無線受信モジュールと、赤外線受光モジュールは使っていません。
【回路構成】
上記構成図に基づいて作成した制御部の回路図が下図となります。
左側が無線と赤外線の受信部、右側がモータドライバとなるFETアレイです。
無線と赤外線の受信部は使っていません。
ラインセンサ基板の回路図は下図となっています。
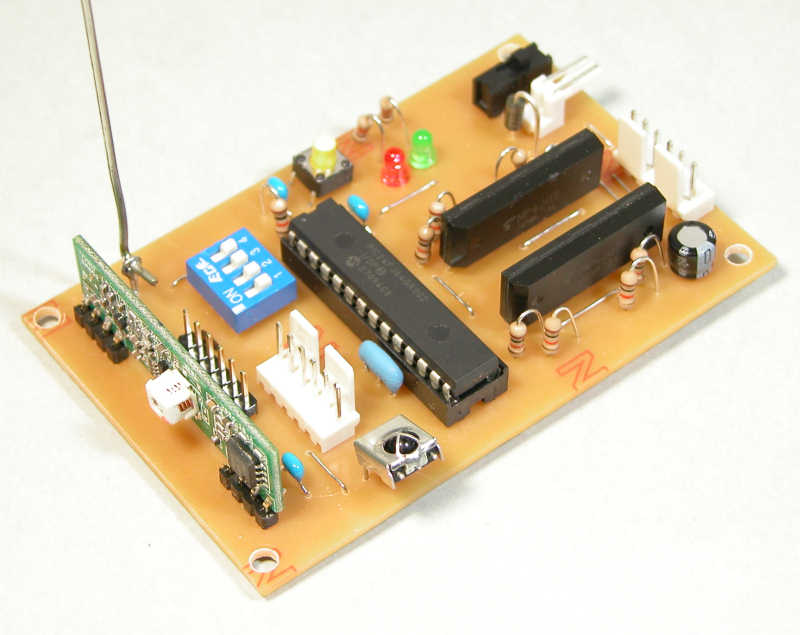
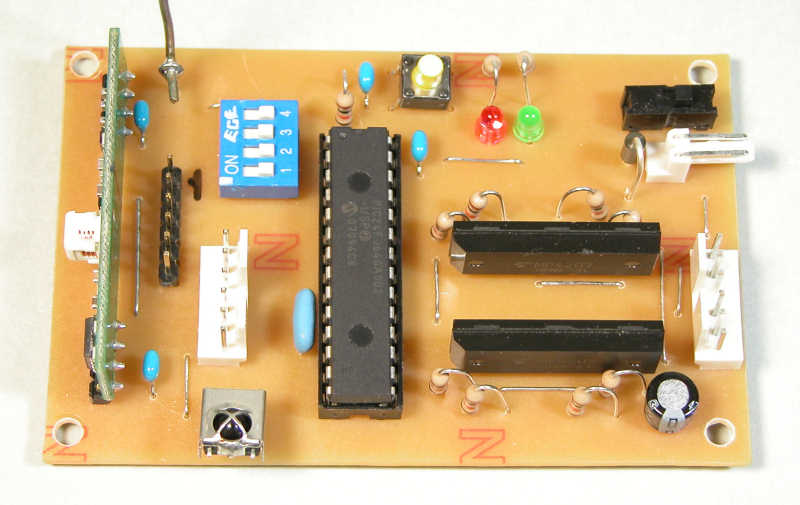
【外観】
制御部の外観は下図のようになっています。
左端が無線受信モジュール
AM方式の315MHz帯用です。
右側が2個のFETアレイです。
★★★ 実装図ダウンロード
モータドライバがFETアレイだけに
なったので、非常にすっきりした
構成となりました。
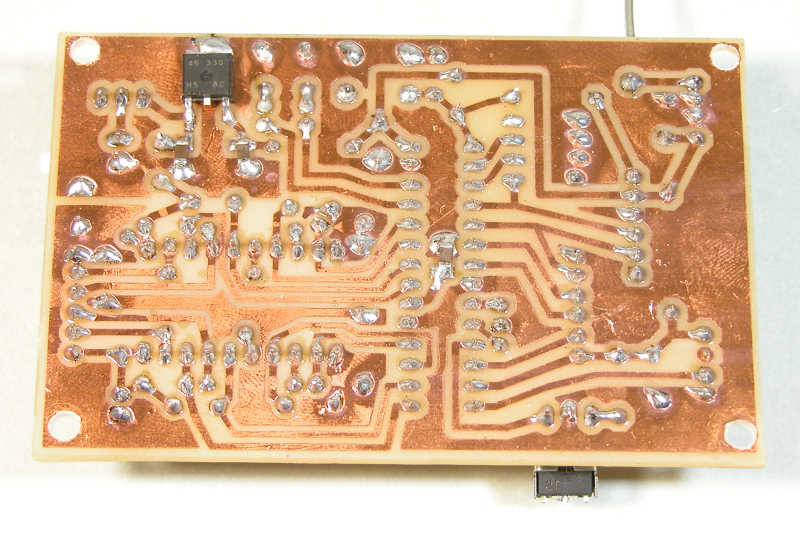
3端子レギュレータとパスコン
だけが実装されています。
★★★ パターン図ダウンロード
ラインセンサ基板の外観です。
センサ自身ははんだ面側
に実装しています。
★★★ 実装図ダウンロード
★★★ パターン図ダウンロード
【プログラム概要】
プログラムはMPLAB C30のフリー版のCコンパイラですべて作成しました。
センサのオンオフにより同じ側のモータの速度をアップダウンさせて車の
走行方向を変更しています。
★★★ ライントレーサ プログラムダウンロード