【概要】
パソコンのプリンタインターフェースに接続して、パラレル通信を
行うためのハードウェアについて説明します。
PICには、PIC16F711を使っていますが、今回のパラレル通信の
プログラムは、大部分のPICシリーズで、共通に使うことができ、
色々な応用が可能です。
【仕様】
パラレル接続用PICのハードウェアの仕様には、特別なものは無く、
単にどのポートを使うかだけがポイントになります。
しかし、送信の時と、受信の時で、使い方が逆になるので注意が
必要です。
8ビットデータ : PORT BのRB0~RB7
このポートは送信の時は出力モードとして使い、 受信の時
は入力モードとして使う。
入力モードの時には内部プルアップをONとして使う。
ストローブ/ビジー出力 : RA2
このポートは、送信時はストローブ信号出力として使い、
受信時にはストローブ信号出力として使う。
ストローブ/ビジー入力 : RA3
このポートは、送信時にはビジー入力として使い、受信時には
ストローブ信号入力として使う。
【回路構成】
この条件でパラレルインターフェース用のPICの回路は下図の様に
なります。
下図はPIC16C711を使用していますが、その他でも同様です。
また、下記回路図はパラレル接続用に必要な部分のみ示しており、
その他の空いた入出力ピンは、他の用途に使うことが可能です。
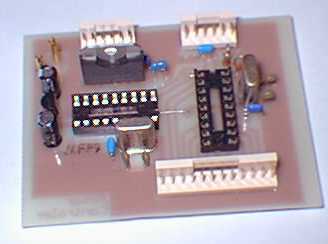
【組み立て例】
上記の回路で実際に組み立てた例を説明します。
下図は、モータの試験用の機能ユニットで、PIC16C711とPIC16F84
という2個のPICで構成されています。
16C711の方で、ハンドシェイク通信でパソコンと接続し、さらにモータ
の電流測定や、回転数の測定も行います。
16F84の方では、モータの実際の制御を行います。この制御方法を
いろいろ変えて、モータの動作を実測し、そのデータをパソコンに
送ってデータ処理をしようとするものです。
【パソコンとの接続】
上記回路でPICのハードを構成したら、パソコンのプリンタインターフェース
とは、下図のように接続します。
接続ケーブルには、市販のプリンタケーブルでも良いですが、パソコン用
ケーブルとコネクタを購入して組み立ててみましょう。
ACK信号は実際には使わないので、接続しなくてもOKです。
またGNDの接続は19~30ピンのいずれかに接続すれば良いのですが、
誤動作を防ぐために、3本以上の線を使って複数ピンのGNDを接続します。
これは、GNDを強化して信号波形がきれいに伝わるようにするためです。
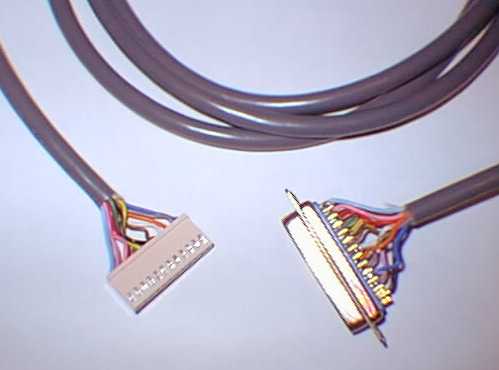
下図は自作接続ケーブルの例です。
12芯のパソコンケーブルと25ピンのDSUBコネクタで作ります。
基板側のコネクタは12ピンの
基板用です。
比較的太いケーブルなのでノイズ
にも強く安心して使えます。
シールド付きのケーブルもあります。